
Власти объяснили, для чего нужны островки безопасности на Комсомольском проспекте
В мэрии Челябинска рассказали об островках безопасности и сужении дорог на Комсомольском проспекте.
По словам вице-мэра по дорожному хозяйству Максима Куляшова, островки безопасности позволят предотвращать ошибочные и умышленные нарушения ПДД.
«Эти островки безопасности будут задавать правильную траекторию, исключат возможность, когда по нескольким траекториям водители будут поворачивать налево, а затем, одновременно перестраиваясь в крайнюю левую полосу, создавать затор за перекрестком. Второй момент — это исключит нарушения правил дорожного движения, когда водители из полосы, предназначенной для поворота только налево, будут двигаться прямо и встраиваться в поток. Он просто напросто упрется в этот островок. Мы создадим безопасные, комфортные условия для пешеходов при переходе Комсомольского проспекта. Если у пешехода не хватит по каким-то причинам времени перейти улицу, он спокойно переждет смену сигнала на этом островке», — отметил он.
На этой неделе на перекрестках проспекта нанесут временную дорожную разметку оранжевого цвета. Постоянная появится после укладки верхнего слоя асфальта. Максим Куляшов подчеркнул, что островки безопасности создаются за счет уменьшения ширины полос, а не сокращения их количества.
«Примененные решения будут следующие. Выделенная полоса для движения общественного транспорта — 3,75 — это гостовская ширина. Остальные полосы для движения — это 3,25 м. Опасения горожан, участников движения о том, что снизится пропускная способность, они ничем не обоснованны. Что даст сокращение ширины полос? При сокращении ширины полос уменьшится боковой интервал, соответственно выровняется скорость потока. При уменьшенном боковом интервале скорость потока транспорта, в целом стабилизируется, будет однородной. При сокращении бокового интервала уменьшится скорость, уменьшится дистанция между транспортными средствами, плотность потока увеличится. Соответственно, пропускная способность возрастет», — прокомментировал он.
Сейчас ширина полос на Комсомольском проспекте доходит до четырех метров. Масштабный ремонт Комсомольского проспекта стартовал в апреле этого года. Работы идут на участке от Чичерина до Чайковского. Их планируют завершить до 20 августа. На проспекте появятся полосы для общественного транспорта и велодорожка.
Фото: chelyabinsk-news.net
Если у вас есть дополнительная информация к данному сообщению, присылайте ее в редакцию «Челябинского эха». Ждем подробностей, фото- и видеоматериалов. Отправляйте их на электронную почту to:[email protected]»>[email protected], в группу во «ВКонтакте», на страницу в Facebook, в Viber — 8-922-755-999-5. Телефон редакции
Вступили в силу изменения в ПДД Новости СПБ.АВТО
Вступили в силу изменения в ПДД
Сегодня, 15 апреля 2015 года, вступило в силу постановление правительства РФ от 2 апреля 2015 года № 315, вносящее изменения в Правила дорожного движения, сообщает МВД. В ПДД вводится несколько новых обозначений, знаков и технических средств, в частности, для организации дорожного движения:
1.Контурная подсветка дополнительной секции светофора:
С 15 апреля 2015 года на дорогах можно встретить новый вариант светофора с дополнительной секцией:
Было: 6.3. Сигналы светофора, выполненные в виде стрелок красного, желтого и зеленого цветов, имеют то же значение, что и круглые сигналы соответствующего цвета, но их действие распространяется только на направление (направления), указываемое стрелками. При этом стрелка, разрешающая поворот налево, разрешает и разворот, если это не запрещено соответствующим дорожным знаком.
Такое же значение имеет зеленая стрелка в дополнительной секции. Выключенный сигнал дополнительной секции означает запрещение движения в направлении, регулируемом этой секцией.
Стало: 6.3. Сигналы светофора, выполненные в виде стрелок красного, желтого и зеленого цветов, имеют то же значение, что и круглые сигналы соответствующего цвета, но их действие распространяется только на направление (направления), указываемое стрелками. При этом стрелка, разрешающая поворот налево, разрешает и разворот, если это не запрещено соответствующим дорожным знаком.
Такое же значение имеет зеленая стрелка в дополнительной секции. Выключенный сигнал дополнительной секции или включенный световой сигнал красного цвета ее контура означает запрещение движения в направлении, регулируемом этой секцией.
Итак, судя по всему на отечественных дорогах теперь будут появляться светофоры с дополнительной секцией, имеющей красный световой сигнал контура (красную рамочку).
На практике каждый водитель хотя бы раз сталкивался со следующей ситуацией. При движении в темное время суток дополнительную секцию светофора зачастую бывает не видно. При этом водитель может не заметить контурные стрелки, нанесенные на основную часть светофора, и повернуть на запрещающий сигнал. Введение дополнительных секций с красной контурной подсветкой поможет решить данную проблему.
Остается надеяться, что светофоры на дорогах будут обновлены в ближайшее время. Данное техническое нововведение действительно очень полезно.
Данное техническое нововведение действительно очень полезно.
2.Постановка транспортных средств у края проезжей части:
Довольно существенным изменениям подверглись правила постановки транспортных средств:
Было: 12.2. Ставить транспортное средство разрешается в один ряд параллельно краю проезжей части, за исключением тех мест, конфигурация (местное уширение проезжей части) которых допускает иное расположение транспортных средств. Двухколесные транспортные средства без бокового прицепа допускается ставить в два ряда.
Стоянка на краю тротуара, граничащего с проезжей частью, разрешается только легковым автомобилям, мотоциклам, мопедам и велосипедам в местах, обозначенных знаком 6.4 с одной из табличек 8.4.7, 8.6.2, 8.6.3, 8.6.6 — 8.6.9.
Стало: 12.2. Ставить транспортное средство разрешается в один ряд параллельно краю проезжей части. Двухколесные транспортные средства без бокового прицепа допускается ставить в два ряда.
Способ постановки транспортного средства на стоянке (парковке) определяется знаком 6.4 и линиями дорожной разметки, знаком 6.4 с одной из табличек 8.6.1 — 8.6.9 и линиями дорожной разметки или без таковых.
Сочетание знака 6.4 с одной из табличек 8.6.4 — 8.6.9, а также линиями дорожной разметки допускает постановку транспортного средства под углом к краю проезжей части в случае, если конфигурация (местное уширение) проезжей части допускает такое расположение.
Стоянка на краю тротуара, граничащего с проезжей частью, разрешается только легковым автомобилям, мотоциклам, мопедам и велосипедам в местах, обозначенных знаком 6.4 с одной из табличек 8.4.7, 8.6.2, 8.6.3, 8.6.6 — 8.6.9.
Для начала давайте обратим внимание на подчеркнутое предложение, которое удалено из правил. До 15 апреля 2015 года у водителей существовала возможность поставить транспортное средство перпендикулярно краю проезжей части или под углом к краю проезжей части в любом «парковочном кармане».
Начиная с 15 апреля 2015 года в «карманах», не обозначенных знаками, ставить автомобили можно будет только параллельно краю проезжей части.
Теперь рассмотрим новые абзацы, добавленные в пункт 12.2.
Во-первых, теперь в правилах указаны особенности постановки транспортных средств на стоянках (парковках). Раньше это просто подразумевалось. Теперь же в правилах четко указано, что ставить автомобили на парковке у супермаркета нужно, руководствуясь линиями разметки. Кстати, теперь для разметки парковок будет применяться новая разметка, но о ней речь пойдет чуть ниже.
Во-вторых, теперь правила разрешают ставить автомобили в том числе и под углом к краю проезжей части
 Обратите внимание, должны быть одновременно и знаки, и разметка. В противном случае ставить автомобили под углом запрещается.
Обратите внимание, должны быть одновременно и знаки, и разметка. В противном случае ставить автомобили под углом запрещается.
3.Разметка для зоны парковки:
Было:1.7 (прерывистая линия с короткими штрихами и равными им промежутками) — обозначает полосы движения в пределах перекрестка;
Стало: 1.7 (прерывистая линия с короткими штрихами и равными им промежутками) — обозначает полосы движения в пределах перекрестка. Применяется для разметки зоны парковки;
Начиная с 15 апреля 2015 года для разметки парковок будут использоваться не сплошные линии разметки, а прерывистые (разметка 1.7).
Следующее изменение затронуло табличку 8.6.1:
Было: 8.6.1 — 8.6.9 «Способ постановки транспортного средства на стоянку». 8.6.1 указывает, что все транспортные средства должны быть поставлены на стоянку на проезжей части вдоль тротуара; 8. 6.2 — 8.6.9 указывают способ постановки легковых автомобилей и мотоциклов на околотротуарной стоянке.
6.2 — 8.6.9 указывают способ постановки легковых автомобилей и мотоциклов на околотротуарной стоянке.
Стало: 8.6.1 — 8.6.9 «Способ постановки транспортного средства на стоянку». 8.6.1 указывает, что все транспортные средства должны быть поставлены на стоянку параллельно краю проезжей части; 8.6.2 — 8.6.9 указывают способ постановки легковых автомобилей и мотоциклов на околотротуарной стоянке.
До 15 апреля данная табличка могла использоваться только на дорогах с тротуаром, после 15 апреля она будет устанавливаться на любых дорогах.
4.Новый знак «Стоянка только для владельцев парковочных разрешений»
В правила дорожного движения вводится новый дорожный знак 8.9.1:
Стало: 8.9.1 «Стоянка только для владельцев парковочных разрешений». Указывает, что на парковке, обозначенной знаком 6.4, могут размещаться только транспортные средства, владельцы которых имеют разрешение на парковку, полученное в установленном органами исполнительной власти субъекта Российской Федерации или органами местного самоуправления порядке и действующее в пределах территории, границы которой установлены соответствующими органами исполнительной власти субъекта Российской Федерации или органами местного самоуправления.
К сожалению, изображение данного знака пока что найти не удалось. Как только оно будет получено, данная статья будет обновлена.
5.Островки безопасности для пешеходов:
С 15 апреля 2015 года в правила вводится новое понятие островок безопасности:
Стало: «Островок безопасности» — элемент обустройства дороги, разделяющий полосы движения противоположных направлений (в том числе и полосы для велосипедистов), конструктивно выделенный бордюрным камнем над проезжей частью дороги или обозначенный техническими средствами организации дорожного движения и предназначенный для остановки пешеходов при переходе проезжей части дороги. К островку безопасности может относиться часть разделительной полосы, через которую проложен пешеходный переход.
Также редактированию подвергся и пункт 4.6, который теперь обязывает пешеходов, не успевших перейти проезжую часть, останавливаться на островках безопасности:
Было: 4. 6. Выйдя на проезжую часть (трамвайные пути), пешеходы не должны задерживаться или останавливаться, если это не связано с обеспечением безопасности движения. Пешеходы, не успевшие закончить переход, должны остановиться на линии, разделяющей транспортные потоки противоположных направлений. Продолжать переход можно лишь убедившись в безопасности дальнейшего движения и с учетом сигнала светофора (регулировщика).
Стало: 4.6. Выйдя на проезжую часть (трамвайные пути), пешеходы не должны задерживаться или останавливаться, если это не связано с обеспечением безопасности движения. Пешеходы, не успевшие закончить переход, должны остановиться на островке безопасности или на линии, разделяющей транспортные потоки противоположных направлений. Продолжать переход можно лишь убедившись в безопасности дальнейшего движения и с учетом сигнала светофора (регулировщика).
6.Диагональные пешеходные переходы:
Еще одно важное нововведение от 15 апреля 2015 года — ограничение на переход по диагонали:
Было: 4. 3. Пешеходы должны переходить дорогу по пешеходным переходам, в том числе по подземным и надземным, а при их отсутствии — на перекрестках по линии тротуаров или обочин.
3. Пешеходы должны переходить дорогу по пешеходным переходам, в том числе по подземным и надземным, а при их отсутствии — на перекрестках по линии тротуаров или обочин.
При отсутствии в зоне видимости перехода или перекрестка разрешается переходить дорогу под прямым углом к краю проезжей части на участках без разделительной полосы и ограждений там, где она хорошо просматривается в обе стороны.
Стало: 4.3. Пешеходы должны переходить дорогу по пешеходным переходам, в том числе по подземным и надземным, а при их отсутствии — на перекрестках по линии тротуаров или обочин.
На регулируемом перекрестке допускается переходить проезжую часть между противоположными углами перекрестка (по диагонали) только при наличии разметки 1.14.1 или 1.14.2, обозначающей такой пешеходный переход.
При отсутствии в зоне видимости перехода или перекрестка разрешается переходить дорогу под прямым углом к краю проезжей части на участках без разделительной полосы и ограждений там, где она хорошо просматривается в обе стороны.
Начиная с 15 апреля переходить дорогу по диагонали можно лишь на тех регулируемых перекрестках, где нанесена диагональная дорожная разметка:
Если разметка отсутствует или не видна, то переходить перекресток по диагонали запрещено.
Напомню, что до 15 апреля на некоторых регулируемых перекрестках без разметки переходить дорогу не запрещалось. Например, если знак, обозначающий начало пешеходного перехода, установлен до перекрестка, а знак, обозначающий конец перехода, — после. В этом случае в зону перехода попадал весь перекресток, поэтому при отсутствии разметки пешеходы могли ходить по диагонали. С 15 апреля 2015 года переход по диагонали на перекрестке без разметки будет являться нарушением правил дорожного движения.
7. Новое обозначение полосы для велосипедистов:
С 15 апреля 2015 года выделенная полоса для велосипедистов будет обозначаться новым знаком:
Было: «Полоса для велосипедистов» — полоса проезжей части, предназначенная для движения велосипедистов и на мопедах, отделенная от остальной проезжей части горизонтальной разметкой и обозначенная знаком 4. 4.1 в сочетании с табличкой 8.14, расположенными над полосой.
4.1 в сочетании с табличкой 8.14, расположенными над полосой.
Стало: «Полоса для велосипедистов» — полоса проезжей части, предназначенная для движения на велосипедах и мопедах, отделенная от остальной проезжей части горизонтальной разметкой и обозначенная знаком 5.14.2.
В связи с этим подкорректированы названия дорожных знаков:
Было:
4.4.1 «Велосипедная дорожка или полоса для велосипедистов».
4.4.2 «Конец велосипедной дорожки или полосы для велосипедистов».
Стало:
4.4.1 «Велосипедная дорожка».
4.4.2 «Конец велосипедной дорожки».
Кроме того, введены новые дорожные знаки, обозначающие начало и конец выделенной полосы для велосипедистов:
Стало:
5.14.2 «Полоса для велосипедистов».
5. 14.3 «Конец полосы для велосипедистов».
14.3 «Конец полосы для велосипедистов».
8. Движение велосипедистов по выделенной полосе для общественного транспорта:
Начиная с 15 апреля 2015 года разрешается движение велосипедистов по выделенным полосам для маршрутных транспортных средств:
Было:18.2. На дорогах с полосой для маршрутных транспортных средств, обозначенных знаками 5.11, 5.13.1, 5.13.2, 5.14, запрещаются движение и остановка других транспортных средств на этой полосе (за исключением транспортных средств, используемых в качестве легкового такси).
Стало:18.2. На дорогах с полосой для маршрутных транспортных средств, обозначенных знаками 5.11, 5.13.1, 5.13.2, 5.14, запрещаются движение и остановка других транспортных средств на этой полосе (за исключением транспортных средств, используемых в качестве легкового такси, а также велосипедистов — в случае, если полоса для маршрутных транспортных средств располагается справа).
Теперь велосипедисты могут передвигаться по выделенным полосам, расположенным справа.
В связи с этим изменением откорректированы и описания дорожных знаков, обозначающих выделенную полосу:
Было: 5.11.1 «Дорога с полосой для маршрутных транспортных средств». Дорога, по которой движение маршрутных транспортных средств и транспортных средств, используемых в качестве легкового такси, осуществляется по специально выделенной полосе навстречу общему потоку транспортных средств.
5.14 «Полоса для маршрутных транспортных средств». Полоса, предназначенная для движения только маршрутных транспортных средств и транспортных средств, используемых в качестве легкового такси, движущихся попутно общему потоку транспортных средств.
Стало: 5.11.1 «Дорога с полосой для маршрутных транспортных средств». Дорога, по которой движение маршрутных транспортных средств, велосипедистов и транспортных средств, используемых в качестве легкового такси, осуществляется по специально выделенной полосе навстречу общему потоку транспортных средств.
5.14 «Полоса для маршрутных транспортных средств». Полоса, предназначенная для движения только маршрутных транспортных средств, велосипедистов и транспортных средств, используемых в качестве легкового такси, движущихся попутно общему потоку транспортных средств.
Начиная с 15 апреля 2015 года велосипедистам будет гораздо проще передвигаться по городам, имеющим большое количество выделенных полос для общественного транспорта.
На этом рассмотрение изменений правил дорожного движения закончено. Будем надеяться, что они окажут положительное влияние на жизнь участников дорожного движения.
Опубликованные материалы на сайте СМИ «Солнечный свет». Статья Лэпбук «Островок безопасности». Автор: Герлах Елена Николаевна.
Автор: Герлах Елена Николаевна
В статье представлены материалы, описывающие содержание Лэпбука «Островок безопасности»для формирования знаний у старших дошкольников по личной безопасности. Лэпбук «Островок безопасности»- это интерактивная тематическая папка, в которой представлены игры, задания и познавательный материал по формированию основ безопасности жихнедеятельности. На каждой странице разворота лэпбука размещены материалы на формирование знаний безопасности на природе, улице и пожарной безопасности. Одновременно можно знакомить дошкольников с правилами безопасности, а также развивать речь и мелкую моторику.
На каждой странице разворота лэпбука размещены материалы на формирование знаний безопасности на природе, улице и пожарной безопасности. Одновременно можно знакомить дошкольников с правилами безопасности, а также развивать речь и мелкую моторику.
Лэпбук «Островок Безопасности»
для детей старшего дошкольного возраста
Безопасность детей – самая актуальная тема в современных условиях. Дошкольные учреждения – это первая ступень в образовании ребенка. Главная задача дошкольного учреждения – сформировать у детей представления о правилах дорожного движения, правилах безопасного пользования колющими и режущими орудиями ручного труда, безопасного поведения в окружающем мире, в том числе в экстремальных ситуациях; показать значимость правильного безопасного поведения для жизни и здоровья; своих возможностях в охране собственного здоровья.
Современного ребенка ничем не удивишь. Наши воспитанники владеют компьютером, у многих есть планшеты, в группе у нас достаточно дидактического материала для активной деятельности ребенка в течение дня. Нам хотелось сделать необычное пособие, которое бы способствовало решению задач по обеспечению безопасности жизнедеятельности и было интересно детям. Так появился лэпбук «Островок Безопасности».
Нам хотелось сделать необычное пособие, которое бы способствовало решению задач по обеспечению безопасности жизнедеятельности и было интересно детям. Так появился лэпбук «Островок Безопасности».
Лэпбук – интерактивная тематическая папка с множеством конвертов, карманов, в которых содержатся игры и задания для детей, другой познавательный материал по формированию основ безопасности жизнедеятельности.
Цель: систематизация знаний дошкольников о правилах безопасного поведения, сохранения личного здоровья.
СОДЕРЖАНИЕ ЛЭПБУКА
«Островок Безопасности»
для детей старшего дошкольного возраста
Обложка ЛЭПБУКА.
Разворот ЛЭПБУКА.
1 страница разворота
Представлены следующие материалы по Безопасности дома и на природе:
дидактическая интерактивная игра
«
Ошибки сказочных героев
»
;
Дидактическая игра
«Оказание первой помощи»
;
Сюжетные картинки «
Правила поведения в общественных местах».
Цель: закрепить представления об опасных ситуациях дома и на природе, рассмотреть алгоритмы оказания первой помощи при травмах, возникающих в быту.
2 страница разворота
Представлены следующие материалы по Безопасности на улице:
Пособие
«Справочник службы спасения»
закрепляет знания телефонов экстренных служб.
Информационный блок
«Знаки дорожного движения»
«Раскрась знаки»
Разрезные картинки
о
правилах
безопасного поведения
.
Сюжетные картинки
по безопасности на улице
способствующие закрепления правил
безопасного поведения на дороге
.
Лабиринты
(представлены в конверте)
Цель: закрепить правила безопасного поведения на улице, развивать речь, учить доказывать и аргументировать свою точку зрения, развивать мелкую моторику
3 страница разворота
Представлены материалы по Пожарной безопасности:
Дидактическая
игра по
изучению правил пожарной безопасности
Демонстрационные материалы
«Правила поведения при пожаре»
«Пожарный щит»
со съемными инструментами
Цель: закрепить знания детей по пожарной безопасности.
такси авария
«Люди, события, факты» — вы делаете те новости, которые происходят вокруг нас. А мы о них говорим. Это рубрика о самых актуальных событиях. Интересные сюжеты и горячие репортажи, нескучные интервью и яркие мнения.
События внутренней, внешней и международной политики, политические интриги и тайны, невидимые рычаги принятия публичных решений, закулисье переговоров, аналитика по произошедшим событиям и прогнозы на ближайшее будущее и перспективные тенденции, публичные лица мировой политики и их «серые кардиналы», заговоры против России и разоблачения отечественной «пятой колонны» – всё это и многое вы найдёте в материалах отдела политики Царьграда.
Идеологический отдел Царьграда – это фабрика русских смыслов. Мы не раскрываем подковёрные интриги, не «изобретаем велосипеды» и не «открываем Америку». Мы возвращаем утраченные смыслы очевидным вещам. Россия – великая православная держава с тысячелетней историей. Русская Церковь – основа нашей государственности и культуры. Москва – Третий Рим. Русский – тот, кто искренне любит Россию, её историю и культуру. Семья – союз мужчины и женщины. И их дети. Желательно, много детей. Народосбережение – ключевая задача государства. Задача, которую невозможно решить без внятной идеологии.
Мы возвращаем утраченные смыслы очевидным вещам. Россия – великая православная держава с тысячелетней историей. Русская Церковь – основа нашей государственности и культуры. Москва – Третий Рим. Русский – тот, кто искренне любит Россию, её историю и культуру. Семья – союз мужчины и женщины. И их дети. Желательно, много детей. Народосбережение – ключевая задача государства. Задача, которую невозможно решить без внятной идеологии.
Расследования Царьграда – плод совместной работы группы аналитиков и экспертов. Мы вскрываем механизм работы олигархических корпораций, анатомию подготовки цветных революций, структуру преступных этнических группировок. Мы обнажаем неприглядные факты и показываем опасные тенденции, не даём покоя прокуратуре и следственным органам, губернаторам и «авторитетам». Мы защищаем Россию не просто словом, а свидетельствами и документами.
Экономический отдел телеканала «Царьград» является единственным среди всех крупных СМИ, который отвергает либерально-монетаристские принципы. Мы являемся противниками встраивания России в глобалисткую систему мироустройства, выступаем за экономический суверенитет и независимость нашего государства.
Мы являемся противниками встраивания России в глобалисткую систему мироустройства, выступаем за экономический суверенитет и независимость нашего государства.
квитанций за неправильный поворот | Юстиа
Водители часто резко поворачивают, не сигнализируя, или не учитывают окружающую обстановку при повороте. Это может привести к штрафу за нарушение правил дорожного движения, хотя обвинение должно будет доказать, что водитель нарушил каждый элемент применимого правила, что может быть очень техническим. Один из распространенных типов билетов предполагает отсутствие непрерывной подачи сигналов перед поворотом.Водителю обычно нужно подать сигнал примерно за 100 футов до поворота. Решение о том, подал ли водитель сигнал перед поворотом, обычно сводится к тому, кто больше заслуживает доверия: полицейский или водитель, поэтому выиграть в таких случаях может быть сложно.
Бороться с другими типами обращений с билетами может быть легче. Например, водитель может быть оштрафован за небезопасный поворот налево перед встречным транспортом. У них может быть веский аргумент, что поворот был безопасным, если не произошла авария, и никакому другому водителю не нужно было сворачивать, чтобы объехать их.В некоторых ситуациях другой водитель может жестом побудить поворачивающего водителя продолжить движение, что также может быть защитой.
Например, водитель может быть оштрафован за небезопасный поворот налево перед встречным транспортом. У них может быть веский аргумент, что поворот был безопасным, если не произошла авария, и никакому другому водителю не нужно было сворачивать, чтобы объехать их.В некоторых ситуациях другой водитель может жестом побудить поворачивающего водителя продолжить движение, что также может быть защитой.
Развороты
Правила дорожного движения, касающиеся разворотов, зависят от штата и, как правило, сложны. Как правило, вы не можете развернуться в деловом районе, если только вы не поворачиваете с крайней левой полосы на светофоре. Если вас оштрафовали за разворот в деловом районе, обвинение обязано доказать, что вы действительно находились в деловом районе.Обычно это означает, что более половины территории на участке, где вы сделали поворот, используется для бизнеса. Если обвинение не представит никаких доказательств по этому вопросу, вы, вероятно, можете добиться отклонения билета.
Обычно вы можете развернуться в жилом районе, если только другое транспортное средство не приближается с любого направления на расстояние, предусмотренное законом штата. Расстояние может быть около 200 футов. (Есть исключение для разворотов на перекрестке, контролируемом устройством управления дорожным движением.) Защита от этого нарушения может включать утверждение о том, что этот район не является жилым районом или что другое транспортное средство не находится на требуемом расстоянии. Сельские районы могут иметь более гибкие правила разворота, поэтому вы можете показать, что в этом районе недостаточно домов, чтобы считать его жилым районом. Если ваш аргумент основан на взаимном расположении транспортных средств, вы можете использовать диаграммы и карты, чтобы доказать свою позицию.
Если элемент нарушения касается расстояния до другого автомобиля, водитель может поставить под сомнение, показав, что офицер только оценил расстояние между водителем и другим автомобилем.
Другие правила применяются к разворотам на автомагистралях или через островки безопасности, которые могут быть физическими барьерами или двумя наборами двойных желтых линий, расположенных на расстоянии двух футов друг от друга. Вы можете развернуться на шоссе, если вы можете видеть на 200 футов в обоих направлениях, независимо от того, приближаются ли другие транспортные средства. Напротив, вы не можете совершить разворот через островок безопасности, если в двойных желтых линиях нет просвета или если они не становятся единым набором двойных линий или набором прерывистых линий.Если есть перерыв на проезжей части, вы можете сделать разворот. У водителя также может быть защита, если ему нужно развернуться, чтобы избежать опасности, но на нем будет бремя доказывания того, что это было необходимо.
Повороты, запрещенные знаками
При наличии на дорожном покрытии знака, светофора или стрелки, запрещающих поворот, водитель обязан соблюдать эти требования. Иногда знак запрещает левый поворот или разворот в определенное время дня из-за интенсивного движения.Эти случаи, как правило, просты, но иногда водитель может утверждать, что знак или сигнал были скрыты. Он мог быть искривлен из-за погодных условий или актов вандализма, либо перед ним мог быть помещен другой знак или предмет.
Иногда знак запрещает левый поворот или разворот в определенное время дня из-за интенсивного движения.Эти случаи, как правило, просты, но иногда водитель может утверждать, что знак или сигнал были скрыты. Он мог быть искривлен из-за погодных условий или актов вандализма, либо перед ним мог быть помещен другой знак или предмет.
Широкие повороты
Диаграммы могут помочь водителю защититься от штрафа за предполагаемый широкий поворот.
Независимо от того, поворачиваете ли вы направо или налево, вам нужно оставаться как можно ближе к краю дороги, чтобы повернуть. Это нарушение сводится к субъективному мнению сотрудника, выдающего билет. Водитель может быть в состоянии отменить штраф, показав, что он оставался как можно ближе к краю дороги в данных обстоятельствах. Например, им нужно будет объезжать припаркованные автомобили, транспортные средства, выезжающие с парковки, пешеходов на углах улиц и любые другие препятствия на дороге.
Например, им нужно будет объезжать припаркованные автомобили, транспортные средства, выезжающие с парковки, пешеходов на углах улиц и любые другие препятствия на дороге.
Rhode Island DMV: Развороты
Развороты иногда законны, иногда незаконны. Что ты говоришь? Вы хотите, чтобы иметь возможность сказать разницу? Это должно быть ваш счастливый день.
Вы можете законно развернуться:
1. Пересекать двойную желтую линию, если это безопасно и нет запрещающих знаков.Однако нельзя делать это через тройную желтую линию. Это довольно редко (не существует), но теперь вы знаете.
2. В жилом районе, если в радиусе 200 футов нет встречного транспорта или есть светофор, защищающий вас от встречного транспорта.
3. На большинстве перекрестков, если нет знака «Разворот запрещен». Убедитесь, что вы все еще ждете зеленый свет. Если вы помните, это значит «идти».
Убедитесь, что вы все еще ждете зеленый свет. Если вы помните, это значит «идти».
4. На разделенной автомагистрали, когда имеется проем, специально предназначенный для въезда транспортных средств с целью выполнения разворота или поворота налево.Однако будьте осторожны, так как дорога может быть неустойчивой, ибо все мы знаем, что дорога, разделенная сама с собой, не может устоять. Немного юмора из американской истории для вас. Жаль, больше не повторится. Хотя те, кто не учится на истории, обречены повторять ее в юношеском возрасте.
Не делать — повторяем, делать НЕ — делать разворот:
1. Вблизи или на железнодорожных путях. Ну и интересно, почему это…
2. На разделенной дороге, когда проход не предусмотрен. Вы управляете автомобилем, а не газонокосилкой и, конечно же, не шаровой машиной.
3. Если у вас нет четкой линии обзора как впереди, так и позади вас. Это может быть из-за плохой погоды или из-за того, что вы забыли снять солнцезащитный козырек с лобового стекла.
4. Везде, где вывешен знак «Разворот запрещен». Если только нет второго «Нет» в начале, что сделало бы его двойным отрицанием.
5. Если приближаются машины, которые могут вас сбить. Они могут захотеть ударить и тебя. Они выглядят сумасшедшими.
6. Когда вы едете по улице с односторонним движением. Если значение «улицы с односторонним движением» только что наконец дошло до вас, похлопайте себя по спине.Очень сильное похлопывание по спине. Не бойтесь сбить себя с толку.
7. Перед пожарной частью. Если где-то пожар и вы стоите у них на пути, они, не колеблясь, переедут вас своим большим грузовиком. Они могут даже натравить на вас своего далматина.
8. В корпоративной зоне. Вы не хотите делать несанкционированные развороты перед скрытыми переулками и оживленными парковками. Это рецепт катастрофы. Даже Паула Дин не посоветовала бы вам попробовать это, а она… работает с рецептами… все время.Ладно, может быть, шутки иногда не удались, подайте на нас в суд.
Общие законы Род-Айленда Раздел 31. Автомобили и другие транспортные средства § 31-13-6
Сигналы управления дорожным движением должны иметь следующие значения для транспортных средств и пешеходов:
(1) Постоянные зеленые сигналы имеют следующие значения:
(i) Движение транспортных средств перед круговым зеленым сигналом разрешается двигаться прямо или поворачивать направо или налево или совершать разворот, за исключением случаев, когда такое движение запрещено знаками использования полосы движения, знаками запрета поворота, разметкой полосы движения, отдельными сигнал поворота или другие устройства управления дорожным движением.
(A) Движение транспортных средств, включая транспортные средства, поворачивающие направо или налево или совершающие разворот, должны уступить право проезда:
(I) Пешеходы, находящиеся на соответствующем пешеходном переходе на законных основаниях; и
(II) Другие транспортные средства, находящиеся на перекрестке на законных основаниях.
(B) Движение транспортных средств, поворачивающих налево или совершающих разворот налево, должно уступать право проезда другим транспортным средствам, приближающимся с противоположного направления настолько близко, чтобы представлять непосредственную опасность в то время, когда такое поворачивающее транспортное средство движение через перекресток или в его пределах.
(ii) Пешеходам, стоящим перед круговым зеленым светофором, если иное не указано пешеходным сигналом или другим устройством управления движением, разрешается двигаться по проезжей части в пределах любого обозначенного или немаркированного пешеходного перехода. Пешеход должен уступить право проезда транспортным средствам, законно находящимся в пределах перекрестка или так близко, чтобы создать непосредственную опасность в момент первого включения зеленого сигнала.
(iii) Транспортным средствам, движущимся перед сигналом с зеленой стрелкой, отображаемым отдельно или в сочетании с другим сигналом, разрешается осторожно въезжать на перекресток только для того, чтобы совершить движение, указанное такой стрелкой, или такое другое движение, которое разрешено другими сигналами, отображаемыми на перекрестке. в то же время.
в то же время.
(A) Движение транспортных средств, включая транспортные средства, поворачивающие направо или налево или совершающие разворот, должны уступить право проезда:
(I) Пешеходы, находящиеся на соответствующем пешеходном переходе на законных основаниях; и
(II) Другие транспортные средства, находящиеся на перекрестке на законных основаниях.
(iv) Пешеходы, стоящие перед сигналом с зеленой стрелкой, если иное не указано пешеходным сигналом или другим устройством управления движением, не должны переходить проезжую часть.
(2) Постоянные желтые сигналы имеют следующие значения:
(i) Движение транспортных средств, сталкивающееся с постоянным круговым желтым сигналом, предупреждается о том, что соответствующее движение зеленого цвета прекращается и что сразу после этого будет отображаться постоянный красный сигнал, когда транспортное движение не должно въезжать на перекресток. Правила, изложенные в отношении движения транспортных средств при прекращении движения (движений), продолжают применяться до тех пор, пока горит непрерывный круговой сигнал желтого цвета.
Правила, изложенные в отношении движения транспортных средств при прекращении движения (движений), продолжают применяться до тех пор, пока горит непрерывный круговой сигнал желтого цвета.
(ii) Движение транспортных средств, сталкивающееся с постоянным сигналом желтой стрелки, предупреждается о том, что соответствующее движение с зеленой стрелкой или соответствующее движение с мигающей стрелкой прекращается. Правила, изложенные в отношении эксплуатации транспортных средств при прекращении движения(ий), продолжают применяться до тех пор, пока горит непрерывный сигнал желтой стрелки.
(iii) Пешеходы, стоящие перед постоянным круговым сигналом желтой или желтой стрелкой, если иное не указано пешеходным сигналом или другим устройством управления движением, не должны начинать переход проезжей части.
(3) Постоянные красные сигналы имеют следующие значения:
(i) Автомобили, движущиеся перед постоянным круговым красным сигналом, если они не въезжают на перекресток, чтобы совершить другое движение, разрешенное другим сигналом, должны останавливаться у четко обозначенной стоп-линии; но при отсутствии стоп-линии движение должно останавливаться перед выходом на пешеходный переход на ближней стороне перекрестка; или если пешеходного перехода нет, то перед въездом на перекресток; и должен оставаться остановленным до тех пор, пока не появится сигнал о продолжении, или как указано ниже:
(A) За исключением случаев, когда устройство управления дорожным движением находится в месте, запрещающем поворот на красный свет, или отображается непрерывный красный сигнал со стрелкой, транспортным средствам, движущимся в направлении непрерывного кругового красного сигнала, разрешается выезжать на перекресток, чтобы повернуть направо. Право продолжить разворот регулируется правилами, применимыми после остановки у знака «стоп».
Право продолжить разворот регулируется правилами, применимыми после остановки у знака «стоп».
(ii) Транспортные средства, движущиеся навстречу постоянному сигналу красной стрелки, не должны въезжать на перекресток, чтобы совершить движение, указанное стрелкой, за исключением случаев въезда на перекресток, чтобы совершить другое движение, разрешенное другим сигналом, и должны останавливаться у четко обозначенной стоп-линии; а при отсутствии стоп-линии до выхода на пешеходный переход с ближней стороны перекрестка; или если пешеходного перехода нет, то перед въездом на перекресток; и должен оставаться остановленным до тех пор, пока не появится сигнал или другое устройство управления движением, разрешающее движение, указанное такой красной стрелкой.
(iii) Пешеходы, стоящие перед постоянным круговым красным сигналом или постоянно красной стрелкой, не должны выходить на проезжую часть, если иное не указано пешеходным сигналом или другим устройством управления движением.
(4) Желтые мигающие сигналы имеют следующие значения:
(i) Движение транспортных средств на подъезде к перекрестку перед мигающим круговым желтым сигналом разрешается с осторожностью въезжать на перекресток, чтобы проехать прямо или повернуть направо или налево или развернуться, за исключением случаев, когда такое движение запрещено использованием полосы движения знаки, знаки, запрещающие повороты, разметку полосы движения, указатели поворота или другие устройства управления дорожным движением.
(A) Такое движение транспортных средств, включая транспортные средства, поворачивающие направо или налево или совершающие разворот, должно уступать право проезда:
(I) Пешеходы, находящиеся на соответствующем пешеходном переходе на законных основаниях; и
(II) Другие транспортные средства, находящиеся на перекрестке на законных основаниях.
(B) Движение транспортных средств, поворачивающих налево или выполняющих разворот налево, должно уступать право проезда другим транспортным средствам, приближающимся с противоположного направления настолько близко, чтобы представлять непосредственную опасность в то время, когда такое поворачивающее транспортное средство движется через или в пределах перекрестка.
(2) Когда мигающий круговой желтый сигнал (сигналы) отображается в качестве маяка в дополнение к другому устройству управления дорожным движением, участники дорожного движения уведомляются о необходимости обратить особое внимание на содержащееся в нем сообщение или о том, что нормативные или предупреждающие требования другого устройства управления дорожным движением, которые могут не применяться постоянно, действуют в настоящее время.
(3) Движение транспортных средств на подъезде к перекрестку перед мигающей желтой стрелкой, отображаемой отдельно или в сочетании с другим сигналом, разрешается с осторожностью въезжать на перекресток только для выполнения движения, указанного такой стрелкой, или другого такого движения, как разрешается другим сигналом, отображаемым в то же время.
(i) Движение транспортных средств, включая транспортные средства, поворачивающие направо или налево или совершающие разворот, должно уступать право проезда:
(A) Пешеходы, находящиеся на соответствующем пешеходном переходе на законных основаниях; и
(B) Другие транспортные средства, находящиеся на перекрестке на законных основаниях.
(I) Движение транспортных средств, поворачивающих налево или выполняющих разворот налево, должно уступать право проезда другим транспортным средствам, приближающимся с противоположного направления настолько близко, чтобы представлять непосредственную опасность в то время, когда такое поворачивающее транспортное средство движется через или в пределах перекрестка.
(4) Пешеходам, стоящим перед любым мигающим желтым сигналом на перекрестке, если иное не указано сигналом для пешеходов или другим устройством управления движением, разрешается двигаться по проезжей части в пределах любого обозначенного или не обозначенного пешеходного перехода. Пешеходы должны уступать дорогу транспортным средствам, законно находящимся на перекрестке, в момент первого включения мигающего желтого сигнала.
Пешеходы должны уступать дорогу транспортным средствам, законно находящимся на перекрестке, в момент первого включения мигающего желтого сигнала.
(5) Мигающие красные сигналы имеют следующие значения:
(i) Движение транспортных средств на подъезде к перекрестку перед мигающим круговым красным сигналом должно останавливаться на четко обозначенной стоп-линии; а при отсутствии стоп-линии до выхода на пешеходный переход с ближней стороны перекрестка; или, если пешеходного перехода нет, в точке, ближайшей к пересекающейся проезжей части, где водитель может видеть приближающееся транспортное средство на пересекающей проезжей части перед въездом на перекресток.Право движения регулируется правилами, применимыми после остановки у знака «стоп».
(ii) Когда мигающий круговой красный сигнал (сигналы) отображается в качестве маяка в дополнение к другому устройству управления дорожным движением, участники дорожного движения уведомляются о необходимости обратить особое внимание на содержащееся в нем сообщение или о том, что нормативные требования в настоящее время действуют другие устройства управления дорожным движением, которые могут применяться не всегда.
(iii) Движение транспортных средств на подъезде к перекрестку перед мигающей красной стрелкой, если они намереваются повернуть в направлении, указанном стрелкой, должно остановиться у четко обозначенной стоп-линии; а при отсутствии стоп-линии до выхода на пешеходный переход с ближней стороны перекрестка; или, если пешеходного перехода нет, в точке, ближайшей к пересекающейся проезжей части, где водитель может видеть приближающееся транспортное средство на пересекающей проезжей части перед въездом на перекресток.Право продолжить поворот ограничивается направлением, указанным стрелкой, и регулируется правилами, применимыми после остановки у знака «стоп».
(iv) Пешеходам, сталкивающимся с любым мигающим красным сигналом на перекрестке, если иное не указано сигналом контроля пешеходов или другим устройством управления движением, разрешается двигаться по проезжей части в пределах любого обозначенного или немаркированного связанного пешеходного перехода. Пешеходы должны уступить дорогу транспортным средствам, законно находящимся на перекрестке, в момент первого включения мигающего красного сигнала.
Пешеходы должны уступить дорогу транспортным средствам, законно находящимся на перекрестке, в момент первого включения мигающего красного сигнала.
FindLaw предоставлены Thomson Reuters Westlaw, ведущей в отрасли онлайн-системой юридических исследований. Для получения более подробной информации об исследованиях кодов, включая аннотации и цитаты, посетите сайт Westlaw.
Кодексы FindLaw могут не отражать самую последнюю версию закона в вашей юрисдикции. Пожалуйста, проверьте статус кода, который вы исследуете, в законодательном собрании штата или через Westlaw, прежде чем полагаться на него для своих юридических нужд.
Разворот как угроза безопасности дорожного движения
Введение
Разворот остается одним из самых опасных маневров для водителей на дорогах мира. Парамедики ежедневно реагируют на тяжелые травмы в результате аварий, которые можно было бы предотвратить, если бы не поспешное решение развернуться в пробке.
Все мы знаем, что развороты в большинстве случаев незаконны — водители серьезно рискуют своей жизнью и жизнями других участников дорожного движения, когда делают это в неправильном месте и неправильным образом.В этом разделе мы хотим сосредоточиться на развороте, чтобы попытаться повысить осведомленность, которая может предотвратить многие дальнейшие аварии.
Почему разворот является таким опасным маневром?
Последствия аварии, вызванной разворотом, часто бывают фатальными. Это неожиданный маневр, который обычно не дает более быстро движущемуся транспортному средству времени изменить курс и избежать аварии.
Для разворота требуется улица, достаточно широкая, чтобы водитель мог выполнить маневр.Разворот особенно опасен, поскольку водителю необходимо пересечь полосу движения, чтобы завершить маневр. Аварии с наездом, когда автомобиль попадает под грузовик, переворачивающий дорогу, являются одними из самых разрушительных аварий. Там, где грузовики не имеют предписанных светоотражающих материалов и ленты, необходимых для лучшей видимости, эта угроза возрастает.
Что предусматривает Закон?
Считаете ли вы безопасным разворот в определенном месте, не имеет значения, если закон гласит, что это незаконно! Первый вопрос при рассмотрении маневра вождения — «Законно ли это?»
Правила дорожного движения и дорожного законодательства, регулирующие разворот, не одинаковы во всех странах.Важно знать правила дорожного движения, на котором вы едете, и соблюдать дорожные знаки и разметку.
Тот факт, что нет дорожного знака «Разворот запрещен», указывающего на то, что разворот запрещен, не означает, что развороты разрешены. Другие факторы, такие как дорожная разметка, нарисованный остров, транспортный поток и многое другое, также могут сделать разворот незаконным маневром. Вы можете ожидать, что это будет незаконным на большинстве дорог в следующих местах;
- На повороте, где приближающийся транспорт с любого направления не виден на расстоянии не менее 150 метров.
- В пределах 30 метров от железнодорожного переезда.

- На бездорожье. Разворот не разрешен на автомагистралях с регулируемым доступом, кроме как через отверстие, предусмотренное для этой цели в разделительной секции бордюра, разделении или линии.
- В пределах 150 метров от моста, виадука или туннеля, где ограничена видимость транспорта.
- Развороты запрещены в запретных зонах и на улицах с односторонним движением.
- Перед пожарной частью
- На перекрестке со светофором [ Скорее всего, вы увидите знак, запрещающий разворот.Будьте осторожны при выполнении этого маневра, даже если это прямо не запрещено дорожным знаком].

Закон о дорожном движении в Южной Африке содержит специальное законодательство, запрещающее разворот на шоссе.
Правило 297 Движение по разделенной дороге общего пользования
Рег. 297.
(1) Всякий раз, когда любая дорога общего пользования разделена на две или более проезжих частей
посредством промежуточного пространства или физического барьера или разделительной секции, сконструированной таким образом, чтобы препятствовать движению транспортных средств, никто не может управлять транспортным средством по такой дороге общего пользования, кроме как по левой проезжей части, если это не указано или не разрешено соответствующим дорожным знаком. или сотрудник дорожного движения, чтобы использовать другую проезжую часть.
(2) Никто не должен управлять транспортным средством на, над, поперек или в пределах любого
, разделяющее пространство, ограждение или секцию, упомянутую в подправиле (1), кроме как через построенный перекресток: При условии, что никто не может проезжать таким образом через такой построенный перекресток, если такое движение запрещено соответствующим дорожным знаком или регулировщиком: При условии кроме того, положения настоящего подзаконного акта не распространяются на инспектора дорожного движения при исполнении им своих обязанностей.
Дорожная техника для предотвращения разворотов
Законодательство о дорожном движении в Южной Африке
Дорожный знак R213 запрещает разворот на месте, где установлен этот знак.
Пересечение определенной дорожной разметки для разворота также запрещено
Вам также не разрешается выполнять разворот, если посередине дороги есть сплошная белая линия, запрещающая обгон, или двойная линия, запрещающая переход, или если вам нужно проехать над окрашенным островком безопасности, чтобы сделать разворот -перемена. Я не встречал правила о том, что нельзя делать разворот на автостраде, хотя это было бы очевидно, потому что автострада обычно имеет центральную сплошную линию, запрещающую пересечение. Таким образом, для всех намерений и целей вам не разрешено делать разворот на автостраде.
Я не встречал правила о том, что нельзя делать разворот на автостраде, хотя это было бы очевидно, потому что автострада обычно имеет центральную сплошную линию, запрещающую пересечение. Таким образом, для всех намерений и целей вам не разрешено делать разворот на автостраде.
Линия обгона запрещена
Нет линии пересечения
Нарисованный остров
Официальные правила для этой дорожной разметки согласно Национальному закону о дорожном движении ЮАР:
Как нам избежать разворота?
Выполнение разворота не является приемлемой техникой вождения и должно выполняться только тогда, когда это разрешено, и только в крайнем случае.Однако могут быть гораздо более безопасные варианты, когда вы обнаружите, что движетесь не в том направлении. Развороты не должны причинять неудобства другим водителям или подвергать кого-либо риску.
Ниже приведены два метода, которые водители могут использовать, чтобы вернуться на курс вместо разворота:
- В городских районах найдите безопасное место для разворота — найдите место, где водитель может безопасно развернуться, не подвергая никого опасности. Открытая парковка — отличное место, чтобы развернуться.
- На автостраде, по кругу по другим дорогам — Дороги взаимосвязаны. Если водитель пропускает поворот, скорее всего, в нескольких километрах впереди есть поворот или съезд. Используйте их, чтобы безопасно вернуться на правильный путь.
Гораздо безопаснее свернуть с дороги, по которой едешь, на повороте, развернуться там, а потом вернуться на оживленную дорогу, используя дорожные знаки на перекрестках!
Выполнение безопасного поворота, а затем безопасное повторное включение в движение, избегая опасности, добавит всего одну или две минуты к вашему времени в пути.
Если разворот разрешен, как его безопасно выполнять?
Разворот — опасный маневр, но каждый водитель в какой-то момент своей водительской жизни совершал разворот. Когда это разрешено законом, его следует выполнять только с должным учетом положения автомобиля, радиуса поворота, встречных автомобилей и ширины проезжей части.
Когда это разрешено законом, его следует выполнять только с должным учетом положения автомобиля, радиуса поворота, встречных автомобилей и ширины проезжей части.
Никогда не недооценивайте мастерство, необходимое для выполнения разворота, особенно в сложных дорожных ситуациях.
Место аварии после незаконного разворота
Где лучше всего сделать разворот?
Всегда лучше свернуть подальше от загруженного и более быстрого трафика.Чтобы найти безопасное место для разворота, учтите следующее:
- На дороге не должно быть дорожных знаков и разметки, запрещающих такой разворот
- Проезжая часть должна иметь не менее 150 м в обоих направлениях беспрепятственного обзора без приближающихся транспортных средств.
- Разворот не должен мешать свободному движению транспорта
- Ваш автомобиль также должен быть хорошо виден другим, кто может приближаться
- Улица или дорога должны быть достаточно широкими для эффективного и безопасного выполнения разворота
- Перед разворотом всегда учитывайте погодные и дорожные условия.
- Такие факторы, как дождь, туман и дымка, могут снизить видимость для всех участников дорожного движения, а скользкое дорожное покрытие из-за дождя или снега может потребовать увеличения тормозного пути для приближающихся автомобилей.

Как сделать разворот?
Если Вам НУЖНО сделать разворот, мы хотели бы посоветовать следующее:
- Избегайте разворотов вблизи поворотов на дороге или на подъеме – лучше проедьте несколько сотен метров дальше, где это безопасно.
- Убедитесь, что у вас достаточно места для поворота, не задев бордюр, припаркованные машины или другие препятствия на обочине.
- Никогда не считайте само собой разумеющимся, что ваш автомобиль видят или что ваши индикаторы в рабочем состоянии.
- Включите указатель поворота, указывающий направление вашего поворота.
- Проверка движения в обоих направлениях
- Будьте терпеливы. Лучше подождите несколько минут, чтобы убедиться, что у вас есть свободная дорога в обоих направлениях, чтобы выполнить поворот.
- Имейте в виду, что если вы не можете завершить поворот, поворот на 3 точки оставит автомобиль неподвижным на более длительное время и повысит риск.
- Слегка нажмите на педаль акселератора, одновременно поворачивая рулевое колесо до упора в нужном направлении.
- Скорость должна быть быстрой, но ответственной во время поворота.
- Не останавливайтесь, если у вас достаточно места, чтобы полностью повернуться.
- Разгонитесь до новой целевой области, проверьте зеркала.
- Будьте тактичны и не становитесь помехой.

Предупреждение для других водителей
Мы хотели бы предостеречь и других водителей, которые движутся в правильном направлении, не делая разворот!
При приближении к транспортному средству, припаркованному на обочине, сбавьте скорость и будьте осторожны – ожидайте неожиданного. Мы должны сохранять бдительность в отношении возможности и рисков, связанных с тем, что впереди идущее транспортное средство меняет направление без указания своего намерения!
Заключение
Разворот иногда называют не только опасным, но и эгоистичным маневром. Не исправляйте собственную ошибку на дороге, подвергая опасности жизнь и здоровье других участников дорожного движения!
Не исправляйте собственную ошибку на дороге, подвергая опасности жизнь и здоровье других участников дорожного движения!
Помните об уважении к другим водителям, будьте осторожны и соблюдайте правила дорожного движения! Если вам нужно сделать разворот — делайте это осторожно. Водите безопасно и прибудьте живым!
[Признание вклада, полученного от Гэвина Хула, информации об экзамене на учащегося и водительских прав www.K53.GavinHoole.ws]
Смотрите также:
Дорожные знаки и безопасность дорожного движения
Техника безопасного вождения и безопасность дорожного движения
Совместное поведение при слиянии при разворотах и их влияние на дорожное движение в среде CVIS
Поведение транспортных средств при разворотах является одной из основных причин заторов на дорогах и аварий в городских условиях.Совместный алгоритм управления слиянием разворотов изучается с предотвращением столкновений и минимизацией задержки для транспортных средств в среде совместной системы инфраструктуры транспортных средств (CVIS). Предлагаются две стратегии управления: слияние почтовых индексов и управление слиянием взводов. Применимость этих двух стратегий сравнивается с точки зрения эффективности и комфорта вождения. Система моделирования клеточного автомата, состоящая из двухстороннего четырехполосного транспортного потока с устройством разворота посреди дороги, создана с внедренным алгоритмом кооперативного управления.Влияние совместного поведения при слиянии с разворотом на эффективность дорожного движения оценивается путем анализа скорости прибытия транспортных средств с основной полосы движения и разворота и их взаимосвязи друг с другом. Результаты моделирования показывают, что скорость прибытия транспортных средств на целевую полосу оказывает большое влияние на задержку движения. Совместное управление может улучшить транспортный поток только при условии, что коэффициент прибытия транспортных средств на целевую полосу меньше 0,7. В нем приведены некоторые практические рекомендации для транспортных агентств по выполнению требований эффективности на участке разворота, когда они применяют стратегию совместного управления.
Предлагаются две стратегии управления: слияние почтовых индексов и управление слиянием взводов. Применимость этих двух стратегий сравнивается с точки зрения эффективности и комфорта вождения. Система моделирования клеточного автомата, состоящая из двухстороннего четырехполосного транспортного потока с устройством разворота посреди дороги, создана с внедренным алгоритмом кооперативного управления.Влияние совместного поведения при слиянии с разворотом на эффективность дорожного движения оценивается путем анализа скорости прибытия транспортных средств с основной полосы движения и разворота и их взаимосвязи друг с другом. Результаты моделирования показывают, что скорость прибытия транспортных средств на целевую полосу оказывает большое влияние на задержку движения. Совместное управление может улучшить транспортный поток только при условии, что коэффициент прибытия транспортных средств на целевую полосу меньше 0,7. В нем приведены некоторые практические рекомендации для транспортных агентств по выполнению требований эффективности на участке разворота, когда они применяют стратегию совместного управления.
1. Введение
Разворотные сооружения используются в качестве открытых площадок для двустороннего движения транспорта на дороге, часто устанавливаются на въезде на перекресток или в середине участка дороги. Поведение транспортных средств при развороте оказывает существенное влияние на эффективность дорожного движения [1–5]. Теоретически автомобили с прямой дорогой должны всегда иметь приоритет перед транспортными средствами с разворотом. Тем не менее, конфликты между транспортными средствами с разворотом и приближающимися транспортными средствами распространены, особенно когда транспортные средства с разворотом находятся в длинной очереди или достигают предела выносливости водителей, или приближающиеся транспортные средства не хотят уступать дорогу.Диспетчеры движения направляют транспортные средства с помощью ограничения скорости, дорожных знаков или дорожной разметки. Однако ответы на эти стратегии руководства различны из-за разных навыков вождения, характеристик и стилей вождения. Таким образом, последствия реализации этих мер не очевидны. Появление новых технологий в транспорте, известных как технология системы совместной инфраструктуры транспортных средств (CVIS), и их внедрение в повседневный городской трафик стали основным направлением деятельности производителей автомобилей, дорожных властей, операторов дорожного движения и исследователей.CVIS предлагает новое решение для контроля безопасности и управления дорожным движением при разворотах.
Движение с разворотом является одной из проблем слияния транспортных средств для двух потоков транспортных средств. Наиболее распространенное поведение при слиянии происходит на съездах и нерегулируемых перекрестках. Стратегия управления слиянием в среде CVIS привлекла большое внимание. Ву и др. [6] разработали основанное на теории игр описание взаимодействия водителей в сцене разворота, а игровая модель была встроена в модель клеточного автомата для определения влияния транспортного средства разворота на производительность движения. В [7, 8] предложены модели совместного управления съездом автомагистрали с пандусом в среде CVIS. В [9] предложен адаптивный метод управления светофором, основанный на условиях транспортного потока, для уменьшения конфликтов и задержек на сигнальных перекрестках. В [10, 11] соответственно были построены скользящая оптимизационная модель управления и улучшенная централизованная модель управления для оптимизации организационной формы перекрестка. В [12] предложена модель движения транспортного средства на перекрестке, основанная на модели прогнозирующей теории управления.В [13, 14] изучалось поведение транспортных средств при повороте в среде CVIS и оценивалось поведение автоматических транспортных средств при развороте. Жа и др. [15] изучали метод своевременной оценки проблемных зон и использовали сигнальный контроль для уменьшения конфликтов в проблемных зонах.
В [7, 8] предложены модели совместного управления съездом автомагистрали с пандусом в среде CVIS. В [9] предложен адаптивный метод управления светофором, основанный на условиях транспортного потока, для уменьшения конфликтов и задержек на сигнальных перекрестках. В [10, 11] соответственно были построены скользящая оптимизационная модель управления и улучшенная централизованная модель управления для оптимизации организационной формы перекрестка. В [12] предложена модель движения транспортного средства на перекрестке, основанная на модели прогнозирующей теории управления.В [13, 14] изучалось поведение транспортных средств при повороте в среде CVIS и оценивалось поведение автоматических транспортных средств при развороте. Жа и др. [15] изучали метод своевременной оценки проблемных зон и использовали сигнальный контроль для уменьшения конфликтов в проблемных зонах.
Предлагаемые алгоритмы кооперативного слияния можно классифицировать по многим аспектам, например по способу управления можно разделить на централизованный и децентрализованный [16–18]. Все транспортные средства управляются автоматически или только отдельные транспортные средства могут общаться между собой [19–24].Транспортные средства на основной и въездной полосах контролируются координировано или контролируются только для одного потока транспортных средств [25–27]. Оптимальные критерии можно разделить на соображения безопасности, комфорта пассажиров, эффективности потока, расхода топлива и выбросов, времени задержки и т. д. [28, 29]. В противном случае учитываются также различия в расположении сетей или расположении органов управления и типа связи между транспортными средствами [30, 31].
Все транспортные средства управляются автоматически или только отдельные транспортные средства могут общаться между собой [19–24].Транспортные средства на основной и въездной полосах контролируются координировано или контролируются только для одного потока транспортных средств [25–27]. Оптимальные критерии можно разделить на соображения безопасности, комфорта пассажиров, эффективности потока, расхода топлива и выбросов, времени задержки и т. д. [28, 29]. В противном случае учитываются также различия в расположении сетей или расположении органов управления и типа связи между транспортными средствами [30, 31].
Целью данной работы является разработка алгоритма централизованного управления между потоками разворотных транспортных средств и потоками въезжающих транспортных средств в середине участка дороги (рис. 1).Предполагается, что все транспортные средства находятся под автоматическим управлением. Целью управления является совместное поведение транспортных средств при слиянии разворотов с предотвращением столкновений и максимальной скоростью. В отличие от алгоритмов управления, применявшихся ранее, алгоритм объединения в этой работе состоит из двух шагов управления, чтобы соответствовать реальной работе транспортных средств с разворотом. Транспортные средства, выполняющие разворот, должны сначала замедлить скорость, чтобы завершить поворот, затем ускориться и в нужное время выбрать правильный промежуток целевой полосы движения.
Этот документ содержит две статьи. Во-первых, это разработка стратегии скоординированного управления для удовлетворения требований объединения почтовых индексов или объединения взводов в среде CVIS, а также изучение порога применения этих двух стратегий путем сравнения комфорта водителя и задержки. Во-вторых, оценивается влияние транспортных средств, совершающих разворот, на характеристики движения на основе полосы движения с учетом влияния скорости прибытия въезжающих транспортных средств, находящихся под совместным управлением и без контроля, а также изучение триггера применения стратегии совместного управления, которое может быть полезно транспортным агентствам для удовлетворения потребностей водителей в затратах времени и комфорте для управления движением с разворотом.
Работа организована следующим образом. В разделе 2 предлагается структура управления слиянием разворотов, а алгоритмы управления, состоящие из слияния zip и слияния взводов, сравниваются с помощью имитационного эксперимента, и применимость этих двух стратегий обсуждается. в разделе 3. В разделе 4 строится система клеточных автоматов со встроенной моделью кооперативного управления разворотом, а эффективность стратегии управления изучается путем анализа производительности трафика.В разделе 5 представлены выводы.
2. Структура и алгоритм управления слиянием U-Turn
2.1. Система управления слиянием
Предполагается, что все транспортные средства являются автоматическими и подчиняются инструкциям Центра управления дорожным движением. На рис. 1 показан сценарий. Существует двусторонняя 4-полосная дорога с разворотным участком в середине, въезжающими транспортными средствами A1 и A2 на полосе 1, B1 и B2 на полосе 2 и разворотным транспортным средством C1 на полосе 3 противоположного направления. Предположим, что C1, начиная с полосы 3, перейдет с полосы 2 на полосу 1.Поскольку средняя изолированная зона, установленная в этой работе, недостаточно широка, чтобы удовлетворить требования по повороту транспортных средств, C1 не может повернуть непосредственно с полосы 3 на полосу 2. В противном случае мы не рассматриваем процесс смены полосы движения транспортных средств с разворотом из с полосы 4 на полосу 3, в качестве объектов исследования выбираются только транспортные средства с разворотом на полосе 3. Возможны три случая слияния: Сценарий 1: машина С1 должна слиться за машинами взвода А1 и А2 на главной полосе. Сценарий 2: машина С1 должна была слиться перед взводными машинами А1 и А2 на основной полосе движения.Сценарий 3: транспортное средство C1 влилось бы между транспортными средствами A1 и A2 на основной полосе движения.
Предположим, что C1, начиная с полосы 3, перейдет с полосы 2 на полосу 1.Поскольку средняя изолированная зона, установленная в этой работе, недостаточно широка, чтобы удовлетворить требования по повороту транспортных средств, C1 не может повернуть непосредственно с полосы 3 на полосу 2. В противном случае мы не рассматриваем процесс смены полосы движения транспортных средств с разворотом из с полосы 4 на полосу 3, в качестве объектов исследования выбираются только транспортные средства с разворотом на полосе 3. Возможны три случая слияния: Сценарий 1: машина С1 должна слиться за машинами взвода А1 и А2 на главной полосе. Сценарий 2: машина С1 должна была слиться перед взводными машинами А1 и А2 на основной полосе движения.Сценарий 3: транспортное средство C1 влилось бы между транспортными средствами A1 и A2 на основной полосе движения.
Первый и второй сценарии являются особыми формами третьего сценария. Все задачи управления слиянием могут быть решены, если сформулировано управление слиянием сценария 3, поэтому в данной работе в качестве исследовательской ситуации выбран третий сценарий.
Установите сегменты дороги S1–S4 в качестве областей совместного управления. Точка S2 является точкой слияния. Все транспортные средства с разворотом, следующие с полосы 3, вынуждены сливаться в этот момент.В среде CVIS транспортные средства с разворотом и основные транспортные средства будут обмениваться информацией с Центром управления дорожным движением. Когда C1 приближается к точке S2, он сканирует объединенные целевые полосы 1 и 2 на возможные интервалы. Как только интервал выбран, C1 будет корректировать скорость транспортного средства, чтобы соответствовать целевому интервалу соответственно в сегменте S1-S2. В противном случае A1, A2 и B1, B2 на основных полосах будут корректировать свои скорости на участке S3-S4, чтобы создать доступные промежутки для C1 для обеспечения безопасности.Целью совместного управления являются оптимальные стратегии вождения транспортных средств путем регулировки скорости и процесса выравнивания промежутков для задействованных транспортных средств (C1, A1, A2, B1 и B2) при условии предотвращения столкновений.
2.2. Алгоритм управления одноповоротным транспортным средством
Как показано на рисунке 1, совместное управление маневром слияния начинается, когда транспортное средство с разворотом хочет выполнить операцию поворота, и виртуальное транспортное средство с разворотом отображается в пространстве между транспортным средством A1 и А2 после прохождения пространства между транспортными средствами В1 и В2 в течение .Начальные расстояния между транспортным средством A2 и точкой S2 и транспортными средствами A1 и S2 равны и соответственно. Начальные расстояния между транспортным средством B2 и точкой S2 и транспортными средствами B1 и S2 равны и соответственно. Начальное расстояние между C1 и точкой S2 равно . Предположим, что скорости всех транспортных средств изначально равны, что обозначается .
2.2.1. Ограничения поведения при вождении транспортного средства B2
Желаемое расстояние между транспортным средством B2 и точкой S2 через t секунд можно описать следующим образом:
Чтобы безопасно добраться до C1, расстояние между транспортным средством B2 и точка S2 на временном шаге должна удовлетворять следующим требованиям: где и представляют собой длину транспортного средства и минимальное безопасное расстояние транспортных средств соответственно.
2.2.2. Ограничения поведения при вождении транспортного средства A2
Желаемое расстояние между транспортным средством A2 и точкой S2 через t секунд можно описать следующим образом:
Когда транспортное средство C1 собирается перейти на полосу 1 после завершения поворота, его скорость ниже, чем другие транспортные средства на полосе 1. Чтобы избежать столкновения с A2 на временном шаге, расстояние между транспортным средством A2 и C1 равно , и оно будет удовлетворять следующему требованию: где , , и — скорости транспортных средств A2 и C1 и ускорение A2 на временном шаге соответственно.
2.2.3. Ограничения поведения при вождении транспортных средств A1, B1 и C1
Чтобы осуществить слияние zip один за другим, транспортные средства A1 и B1 будут регулировать свои скорости, чтобы оставаться впереди сливающегося транспортного средства C1. Расстояние между автомобилем A1 и точкой S2 равно . Расстояние между B1 и S2 равно . Они должны соответствовать требованиям, как показано в уравнении (5) и (6) на временном шаге . Ограничение расстояния показано в уравнении (7):
Ограничение расстояния показано в уравнении (7):
2.3. Алгоритм управления многооборотными транспортными средствами
Существует две стратегии обработки слияния, когда два или более транспортных средства хотят выполнить разворот.Первый — это слияние zip, то есть каждое транспортное средство с разворотом последовательно въезжает в целевую основную полосу движения. Другой — взводное слияние, то есть взвод поворачивающих машин единовременно сливается с целевой полосой. В этой работе обсуждаются две стратегии управления, соответственно, с соответствующими им сценариями.
Как показано на рисунке 2, он описывает процесс объединения шести транспортных средств. Разворотное транспортное средство C1 сливается между транспортными средствами A1 и A2 после пересечения промежутка между B1 и B2.Разворотное транспортное средство C2 сливается с транспортным средством A2 при пересечении полосы 2 после транспортного средства B2. Как показано на рисунке 3, он описывает процесс объединения взводов. Взвод машин разворота в составе С1 и С2 вливается между машинами А1 и А2 после пересечения промежутка между В1 и В2.
Взвод машин разворота в составе С1 и С2 вливается между машинами А1 и А2 после пересечения промежутка между В1 и В2.
2.3.1. Ограничения поведения при вождении транспортных средств C1 и C2 при слиянии ZIP
Как показано на рисунке 2, виртуальные транспортные средства C1′ и C2′ формируются заранее. Транспортное средство C1 удовлетворяет ограничениям (2)~(7), как и отдельное транспортное средство, а транспортное средство C2 должно выехать на целевые полосы после A2 и B2.C2 должен соответствовать следующим ограничениям на временном шаге:
2.3.2. Ограничения поведения транспортных средств C1 и C2 при слиянии взводов
Как показано на рисунке 3, виртуальный взвод транспортных средств с разворотом формируется заранее. Взвод машин С1 и С2 можно рассматривать как одну машину длиной . Ограничения показаны следующим образом:
Уравнение (9) соответствует безопасному расстоянию между B2 и разворотным взводом в момент времени . Уравнение (10) соответствует безопасному расстоянию следования между A2 и группой разворотов и учитывает расстояние, необходимое для разгона группы разворотов до достижения той же скорости с транспортными средствами на целевой полосе.скорость поворота машин взвода на шаге по времени .
Уравнение (10) соответствует безопасному расстоянию следования между A2 и группой разворотов и учитывает расстояние, необходимое для разгона группы разворотов до достижения той же скорости с транспортными средствами на целевой полосе.скорость поворота машин взвода на шаге по времени .
2.4. Оптимизационная модель совместного управления
Следуя оптимизированным траекториям, эти транспортные средства могут безопасно пройти точку слияния S2 без каких-либо конфликтов и достичь минимальной задержки. Стратегия оптимального управления формулируется в виде нелинейной задачи оптимизации следующим образом через (16): st, где i — индекс дорожки (в данной работе представляют дорожку 1, дорожку 2 и дорожку 3), — индекс транспортное средство ( j = 1, 2, …), – k -й временной шаг, – сумма временных шагов, – сумма транспортных средств, участвующих в совместном управлении на полосе, – ускорение транспортного средства на полосе при временной шаг, скорость транспортного средства на полосе движения на временном шаге, расстояние транспортного средства на полосе движения до точки слияния на временном шаге, минимальное ускорение, максимальное ускорение, максимальное изменение ускорения между двумя последовательными временными шагами, расстояние между ведущим транспортным средством на временном шаге и точкой слияния, это расстояние между следующим транспортным средством, которое следует за ведущим транспортным средством на временном шаге, и точкой слияния, это расстояние между транспортными средствами впереди ведущего транспортного средства на временном шаге и слияние p точка, а – расстояние между транспортным средством, следующим за следующим транспортным средством на временном шаге, и точкой слияния.
Путем оптимизации показателей ускорения на каждом этапе модель оптимального управления стремится минимизировать общую задержку всех транспортных средств, въезжающих на каждом этапе принятия решения, с учетом следующих ограничений:
Ограничение (12) гарантирует, что каждое транспортное средство на основных полосах движения неотрицательная скорость, не превышающая ограничение скорости 60 км/ч, и каждое транспортное средство на полосе разворота (полоса 3) поддерживает неотрицательную скорость, не превышающую предельное значение скорости 30 км/ч.
Ограничение (13) гарантирует, что скорость ускорения каждого транспортного средства не больше и не меньше на каждом временном шаге.
Ограничение (14) ограничивает изменения скорости ускорения каждого транспортного средства между двумя последовательными временными шагами, чтобы предотвратить агрессивное поведение при вождении.
Ограничение (15) требует, чтобы расстояние между двумя последовательными транспортными средствами на одной полосе движения было больше минимального значения.
Ограничение (16) гарантирует, что любая пара транспортных средств будет поддерживать безопасное расстояние на каждом временном шаге. Это достигается путем проецирования транспортных средств с разворотом на основную полосу с использованием точки слияния S2 в качестве точки отсчета.
3. Сравнение между проверкой моделей и стратегиями управления
3.1. Проверка модели оптимизации
набор
A MAX MAX = 2 м / с 2 , A мин = -2 м / с 2 , A Max-Diff = 2 м / с 2 и G мин = 10 м. Так как длина транспортного средства обычно составляет 4∼6 м, установите l = 5 м, начальная скорость транспортного средства = 15 м/с, 10 секунд считаются контрольным временем, поэтому м = 10 [32].Эти параметры используются в каждом сценарии.
3.1.1. Сцена с однооборотным транспортным средством
Для проверки эффективности стратегии управления рассматриваются одно транспортное средство с разворотом и четыре транспортных средства на магистрали, как и сцена на рис. 1. Настройка начального состояния x i ,1,0 = 140 м, i = 1, 2; x i ,2,0 = 155 м, i = 1, 2; и x 3,1,0 = 75 м означает, что относительные расстояния между транспортными средствами на полосе 1 и полосе 2 до S2 одинаковы, и транспортное средство с разворотом ближе к S2.Установка = 15 км/ч, i = 1, 2, 3 и j = 1, 2, 3 означает, что начальные скорости всех транспортных средств одинаковы.
1. Настройка начального состояния x i ,1,0 = 140 м, i = 1, 2; x i ,2,0 = 155 м, i = 1, 2; и x 3,1,0 = 75 м означает, что относительные расстояния между транспортными средствами на полосе 1 и полосе 2 до S2 одинаковы, и транспортное средство с разворотом ближе к S2.Установка = 15 км/ч, i = 1, 2, 3 и j = 1, 2, 3 означает, что начальные скорости всех транспортных средств одинаковы.
Результаты моделирования представлены на рисунке 4. Мы проецируем все транспортные средства на одну полосу, и все значения являются относительными значениями, принимая точку S2 в качестве точки отсчета. Рисунок 4(а) ясно показывает, что ограничения на ускорение выполняются. Тенденция изменения транспортного средства C1 отличается от других транспортных средств из-за другого ограничения скорости.Рисунок 4(b) показывает, что все транспортные средства удовлетворяют ограниченной скорости в течение этих 10-секундных интервалов принятия решения. Пространственно-временные траектории этих пяти транспортных средств показаны на рисунке 4(c). Это делается путем проецирования пяти транспортных средств на одну полосу и использования S2 в качестве точки отсчета для расчета расстояний. Выполняя инструкции по оптимальному ускорению, сгенерированные моделью, показано, что пять транспортных средств могут безопасно слиться с минимальным расстоянием между каждой парой транспортных средств, которое составляет 10 метров.В конце контроля расстояния до точки слияния транспортного средства A1 на полосе 1 и транспортного средства A2 на полосе 2 являются отрицательными, что указывает на то, что они прошли точку слияния. Однако расстояние разворотного транспортного средства положительно и стремится к 0, что указывает на то, что оно только что завершило слияние.
Пространственно-временные траектории этих пяти транспортных средств показаны на рисунке 4(c). Это делается путем проецирования пяти транспортных средств на одну полосу и использования S2 в качестве точки отсчета для расчета расстояний. Выполняя инструкции по оптимальному ускорению, сгенерированные моделью, показано, что пять транспортных средств могут безопасно слиться с минимальным расстоянием между каждой парой транспортных средств, которое составляет 10 метров.В конце контроля расстояния до точки слияния транспортного средства A1 на полосе 1 и транспортного средства A2 на полосе 2 являются отрицательными, что указывает на то, что они прошли точку слияния. Однако расстояние разворотного транспортного средства положительно и стремится к 0, что указывает на то, что оно только что завершило слияние.
3.1.2. Сцена с многоповоротным транспортным средством
Начальные состояния транспортных средств приведены ниже так же, как и в сценарии с одним транспортным средством. Настройка x i ,1,0 = 140 м, i = 1, 2; x i ,2,0 = 155 м, i = 1, 2; x 3,1,0 = 75 м; и x 3,2,0 = 90 м означает, что два автомобиля с разворотом приближаются друг к другу. Установка = 15 км/ч, i = 1, 2, 3 и j = 1, 2, 3 означает, что начальные скорости всех транспортных средств одинаковы. Результаты моделирования для слияния молний представлены на рис. 5, а результаты моделирования для слияния взводов представлены на рис. 6. при управлении слиянием больше, чем при управлении слиянием взвода. На рисунках 5(b) и 6(b) видно, что скорости транспортных средств при взводном управлении немного выше, чем при зип-управлении.Спроецируйте шесть автомобилей на одну полосу, как в предыдущем исследовании. На рисунках 5(c) и 6(c) показано, что все управляемые транспортные средства безопасно сливаются в конце временного шага.
Установка = 15 км/ч, i = 1, 2, 3 и j = 1, 2, 3 означает, что начальные скорости всех транспортных средств одинаковы. Результаты моделирования для слияния молний представлены на рис. 5, а результаты моделирования для слияния взводов представлены на рис. 6. при управлении слиянием больше, чем при управлении слиянием взвода. На рисунках 5(b) и 6(b) видно, что скорости транспортных средств при взводном управлении немного выше, чем при зип-управлении.Спроецируйте шесть автомобилей на одну полосу, как в предыдущем исследовании. На рисунках 5(c) и 6(c) показано, что все управляемые транспортные средства безопасно сливаются в конце временного шага.
3.2. Сравнение между зип-контролем и взводом
В этой статье рассматриваются индексы задержки и комфортности вождения для сравнения между зип-слиянием и взводом, чтобы показать преимущества и недостатки каждой стратегии. Чувство комфорта водителей обычно представлено индексом ускорения, основанным на опыте.Разница стандартного отклонения ускорения между этими двумя стратегиями управления рассчитывается как CT. Разница задержек между этими двумя стратегиями управления рассчитывается как DT. Представьте и как задержку и стандартное отклонение ускорения транспортного средства под управлением слияния zip. Представляют и как задержку и среднеквадратичное отклонение ускорения автомобиля под взводным управлением. Итак, разница в задержке и комфорте между этими двумя стратегиями может быть выражена следующим образом:
Разница задержек между этими двумя стратегиями управления рассчитывается как DT. Представьте и как задержку и стандартное отклонение ускорения транспортного средства под управлением слияния zip. Представляют и как задержку и среднеквадратичное отклонение ускорения автомобиля под взводным управлением. Итак, разница в задержке и комфорте между этими двумя стратегиями может быть выражена следующим образом:
Предположим, что на задержку и стандартное отклонение ускорения влияет начальный интервал между транспортными средствами.Переменные k и l представляют интервал движения впереди идущего транспортного средства в группе разворота и интервал движения группы на основной полосе движения соответственно. Взвод формировался, когда расстояние между участниками меньше 100 м в соответствии с теорией следования за автомобилем, поэтому расстояние между ними должно быть меньше 100 м и больше минимального расстояния в 10 м. k и l — интервалы движения разворотного взвода на 3-й дорожке и основного взвода на 1-й дорожке, то есть 10 м ≤ k и l ≤ 100 м.
В этом эксперименте установите x i ,1,0 = 140 м, i = 1, 2; x i ,2,0 = (140 + l ) м, i = 1, 2; x 3,1,0 = 75 м; и x 3,2,0 = (75 + k ) м. Установите = 15 км/ч, i = 1, 2, 3 и j = 1, 2, 3. Скорость и ускорение всех транспортных средств изменяются с настройкой k и l значений трафика поток, а также изменить стратегии управления.И механизм опережения по производительности трафика обсуждается следующим образом.
Результаты численного моделирования представлены на рис. 7 и 8; ДТ и КТ меняются при замене к и л .
3.2.1. Воздействие
k и l на DT ① Когда k < 50 м и DT > 0, задержка слияния zip больше, чем задержка слияния взводов во время распределения . В этом случае целесообразно принять стратегию слияния взводов. ② Когда k ≥ 75 м, DT постепенно уменьшается близко к 0, всегда меньше 0. DT увеличивается с увеличением l . Когда l ≥ 75 m, разница снова больше 0. Показано, что задержка зигзагообразного слияния меньше, чем взводного, когда передний план машин разворотного взвода больше 75 м, а разгон машин на основной полосе меньше 75 м. Таким образом, когда k ≥ 75 м и l ≥ 75 м, рекомендуется использовать стратегию слияния zip.③ Когда l ≥ 75 м и DT > 0, с увеличением l , задержка управления молнией всегда больше, чем задержка слияния взвода. В этом случае целесообразно принять стратегию слияния взводов.
② Когда k ≥ 75 м, DT постепенно уменьшается близко к 0, всегда меньше 0. DT увеличивается с увеличением l . Когда l ≥ 75 m, разница снова больше 0. Показано, что задержка зигзагообразного слияния меньше, чем взводного, когда передний план машин разворотного взвода больше 75 м, а разгон машин на основной полосе меньше 75 м. Таким образом, когда k ≥ 75 м и l ≥ 75 м, рекомендуется использовать стратегию слияния zip.③ Когда l ≥ 75 м и DT > 0, с увеличением l , задержка управления молнией всегда больше, чем задержка слияния взвода. В этом случае целесообразно принять стратегию слияния взводов.
3.2.2. Воздействия
к и к и л и л на CT ①, когда K <20 м и л <60 м или к > 90 м и к > 90 м и кт <0, это указывает на то, что дисперсия ускорения под зип-склейка меньше, чем при взводной сшивке, поэтому удобство водителя при зип-склейке в этих условиях выше. ② В дополнение к описанным выше случаям, CT > 0, это указывает на то, что дисперсия ускорения при слиянии zip больше, чем при слиянии взводов, поэтому комфорт водителя при стратегии слияния взводов выше в этом условии.
② В дополнение к описанным выше случаям, CT > 0, это указывает на то, что дисперсия ускорения при слиянии zip больше, чем при слиянии взводов, поэтому комфорт водителя при стратегии слияния взводов выше в этом условии.
4. Анализ моделирования и обсуждение
4.1. Предположения и сцены моделирования
Создана двухсторонняя четырехполосная клеточно-автоматическая модель транспортного потока с устройством разворота посреди дороги, как показано на рисунке 9.Установите длину дороги в 250 ячеек (937,5 м), а одна ячейка соответствует 3,75 м. Точка слияния находится в 150 ячейках (562,5 м). Временной шаг симуляции установлен равным 1 с. Предполагается, что все автомобили имеют одинаковую длину в 2 клетки (7,5 м), максимальную скорость 5 клеток в секунду (67,5 км/ч), а минимальный интервал составляет 4 клетки (15 м).
Использование классического правила смены полосы движения, предложенного Chowdhury et al. [33] автомобиль сменит полосу движения с вероятностью . Состояние транспортных средств изменяется на каждом временном шаге с использованием правила обновления модели Нэша [34].Вероятность смены полосы (с использованием исследования Лю и Цао [35]). Вероятность случайной модерации основана на опыте.
Состояние транспортных средств изменяется на каждом временном шаге с использованием правила обновления модели Нэша [34].Вероятность смены полосы (с использованием исследования Лю и Цао [35]). Вероятность случайной модерации основана на опыте.
4.2. Анализ моделирования
Путем изменения скоростей прибытия транспортных средств на полосах 1 и 2 (обозначив вероятность как ), скоростей прибытия транспортных средств на полосах 3 и 4 (обозначив вероятность как ) и влияния совместного управления транспортными средствами при развороте на потоке трафика моделируются. Диапазоны значений и установлены как {0,2, 0,4, 0,6, 0.8}, и всего моделируется 4 × 4 = 16 видов дорожных сцен с 500 временными шагами в каждом виде.
Возьмем 0,6 и 0,8 в качестве примера для проверки эффективности стратегии управления в системе моделирования, как показано в таблице 1. Транспортное средство с разворотом прибывает в S1 на 67-й секунде, и требуется 10 секунд, чтобы достичь S2. В этот период времени процесс движения автомобилей А1, А2, В1, В2 и С1 показан в таблице. L1 — это интервал между A1 и A2 на дорожке 1, а L2 — это интервал между B1 и B2 на 2-й дорожке.Начальный интервал L1 и L2 составляет 6 клеток (22,5 м) и 4 клетки (15 м) соответственно. В течение этих 10 секунд транспортные средства регулируют свою скорость и постоянно ускоряются, чтобы выполнить требование слияния разворотов. Интервал составляет 10 ячеек (37,5 м) на дорожке 1 и 8 ячеек (30 м) на дорожке 2 на 77-м временном шаге. Это соответствует ограничениям в алгоритме. Расстояние до B1 составляет −7,5 м, что показывает, что он уже прошел S2. Между тем, расстояние A1 равно нулю. Это означает, что он только что достигает S2, что согласуется с планированием пути в стратегии управления.
L1 — это интервал между A1 и A2 на дорожке 1, а L2 — это интервал между B1 и B2 на 2-й дорожке.Начальный интервал L1 и L2 составляет 6 клеток (22,5 м) и 4 клетки (15 м) соответственно. В течение этих 10 секунд транспортные средства регулируют свою скорость и постоянно ускоряются, чтобы выполнить требование слияния разворотов. Интервал составляет 10 ячеек (37,5 м) на дорожке 1 и 8 ячеек (30 м) на дорожке 2 на 77-м временном шаге. Это соответствует ограничениям в алгоритме. Расстояние до B1 составляет −7,5 м, что показывает, что он уже прошел S2. Между тем, расстояние A1 равно нулю. Это означает, что он только что достигает S2, что согласуется с планированием пути в стратегии управления.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
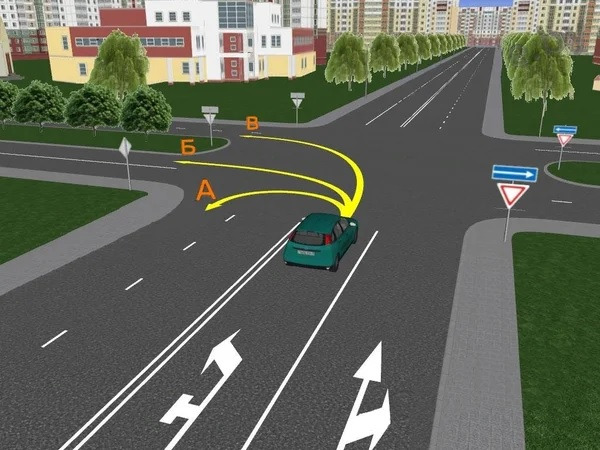 75
75 75
754.3. Обсуждение
4.3.1. Сравнение задержек
Установка средства разворота в середине участка дороги вызовет задержку движения в обоих направлениях полос движения. Задержки трафика сравниваются между средой совместного управления и средой без управления. Что касается среды без контроля, задержка в основном вызвана поведением при смене полосы движения в зоне переплетения и поведением выхода как для транспортных средств с разворотом, так и для приближающихся транспортных средств для предотвращения столкновения при слиянии. Взаимодействие серьезное с увеличением транспортного потока, что приведет к более значительной задержке. Что касается среды совместного управления, задержка в основном вызвана регулировкой скоростей приближающихся транспортных средств для создания доступного интервала для разворота транспортного средства. С увеличением транспортного потока въезжающих транспортных средств скорости более широкого диапазона транспортных средств будут затронуты для создания подходящего интервала, что приведет к серьезной задержке.
Взаимодействие серьезное с увеличением транспортного потока, что приведет к более значительной задержке. Что касается среды совместного управления, задержка в основном вызвана регулировкой скоростей приближающихся транспортных средств для создания доступного интервала для разворота транспортного средства. С увеличением транспортного потока въезжающих транспортных средств скорости более широкого диапазона транспортных средств будут затронуты для создания подходящего интервала, что приведет к серьезной задержке.
В этой работе задержка трафика отслеживается путем наблюдения за изменением транспортного потока на основе теории волн трафика.Задержки учитываются по разным направлениям полос движения. Результаты моделирования показаны на рисунке 10. Ось X представляет каждые 16 видов сцен, а ось Y представляет собой объем трафика для каждой сцены. Тенденция задержки в одних и тех же направлениях аналогична, поскольку транспортным средствам разрешено перестраиваться между одними и теми же полосами движения, что делает транспортный поток в одних и тех же полосах относительно средним.
Чтобы лучше описать преимущества совместного управления, объем трафика сравнивается в различных ситуациях с изменением и .Ось Y представляет разность потоков до и после управления, а положительное значение означает больший поток трафика в сценах без управления. Результат показан на рис. 11.
① Когда разница объема трафика больше нуля. Это показывает, что в этих сценах нет лучшего контроля. Причина в том, что прибывающему транспортному средству требуется больше времени для создания интервалов для разворотных транспортных средств, когда транспортный поток высок на основной полосе, и эта задержка будет распространяться в виде волн вверх по течению, что приведет к постоянному уменьшению транспортного потока. , поэтому задержка трафика высока.② Когда разница объема трафика меньше нуля. Это показывает, что совместное управление лучше в этих сценах. Доступные интервалы позволяют легко попасть на главную полосу для транспортных средств с разворотом, поэтому совместное управление помогает сэкономить время транспортных средств при слиянии. ③ Эффекты значительны для среды без контроля, но меньше для контроля, потому что транспортным средствам с разворотом не нужно ждать слияния в нашей стратегии совместного управления. Однако вероятность ожидания транспортных средств на полосе 3 увеличивается с увеличением.
③ Эффекты значительны для среды без контроля, но меньше для контроля, потому что транспортным средствам с разворотом не нужно ждать слияния в нашей стратегии совместного управления. Однако вероятность ожидания транспортных средств на полосе 3 увеличивается с увеличением.На основании анализа задержек движения на участке зоны разворота можно сделать следующие выводы: когда скорость прибытия транспортных средств на основную полосу не превышает 0,7, кооперативное управление целесообразно для улучшения пропускная способность участка дороги. В противном случае нет необходимости применять стратегии управления. Итак, порог кооперативного управления равен .
4.3.2. Сравнение пространственно-временных диаграмм
Пространственно-временные распределения трафика до и после ситуаций совместного управления показаны на рисунках 12 и 13.Возьмем как 0,4, а как 0,8, например, задаем как 0,6 под две сцены. Ось X представляет пространство, а ось Y представляет время. Центральная – зона разворота. Как показано на Рисунке 12, симуляция выполняется на 10 с позже, в точке разворота до контроля наблюдается непрерывный затор, но после контроля он значительно уменьшается. На рисунке 13 показано, что стратегия управления слиянием с разворотом оказывает большее влияние на транспортный поток перед полосой 1 и на транспортный поток перед полосой 3.В соответствии с выводом выше, эффект совместного управления неочевиден, что еще хуже для дорожного движения, когда коэффициент прибытия транспортных средств на главную полосу превышает 0,7. В противном случае, из-за того, что транспортное средство не ожидает разворота на полосе 4, на полосе 4 не показаны существенные изменения трафика и сравнительные результаты. Установлен оптимальный алгоритм управления, который заложен в модель клеточного автомата.Влияние стратегий управления на производительность трафика количественно исследуется с помощью микроскопического моделирования. Наши работы в основном сводятся к трем аспектам: (1) Алгоритм управления совместным слиянием создан для планирования траекторий транспортного средства с разворотом, и приближающиеся транспортные средства на основной полосе достигают цели предотвращения столкновения и минимальной задержки.
Центральная – зона разворота. Как показано на Рисунке 12, симуляция выполняется на 10 с позже, в точке разворота до контроля наблюдается непрерывный затор, но после контроля он значительно уменьшается. На рисунке 13 показано, что стратегия управления слиянием с разворотом оказывает большее влияние на транспортный поток перед полосой 1 и на транспортный поток перед полосой 3.В соответствии с выводом выше, эффект совместного управления неочевиден, что еще хуже для дорожного движения, когда коэффициент прибытия транспортных средств на главную полосу превышает 0,7. В противном случае, из-за того, что транспортное средство не ожидает разворота на полосе 4, на полосе 4 не показаны существенные изменения трафика и сравнительные результаты. Установлен оптимальный алгоритм управления, который заложен в модель клеточного автомата.Влияние стратегий управления на производительность трафика количественно исследуется с помощью микроскопического моделирования. Наши работы в основном сводятся к трем аспектам: (1) Алгоритм управления совместным слиянием создан для планирования траекторий транспортного средства с разворотом, и приближающиеся транспортные средства на основной полосе достигают цели предотвращения столкновения и минимальной задержки. Ограничения поведения транспортных средств устанавливаются в сценах с одним поворотом транспортного средства и в сцене с несколькими транспортными средствами. (2) Предлагаются две стратегии слияния разворотов, управление почтовым индексом и управление взводом.Показатели задержки и комфорта водителя сравниваются между двумя стратегиями, основанными на изменении интервала движения взвода k транспортных средств с разворотом и интервала движения взвода l транспортных средств основной полосы движения. Результаты численного моделирования показывают, что наиболее подходящая стратегия управления будет меняться при изменении интервала движения между транспортными средствами с разворотом или транспортными средствами на основной полосе. (3) Система моделирования клеточного автомата, состоящая из четырехполосного двустороннего транспортного потока. с возможностью разворота посреди дороги устанавливается со встроенным алгоритмом кооперативного управления.Интенсивность движения на разных полосах сравнивается до и после совместного управления слиянием путем анализа скорости прибытия транспортных средств с основной полосы и разворота и их взаимосвязи друг с другом.
Ограничения поведения транспортных средств устанавливаются в сценах с одним поворотом транспортного средства и в сцене с несколькими транспортными средствами. (2) Предлагаются две стратегии слияния разворотов, управление почтовым индексом и управление взводом.Показатели задержки и комфорта водителя сравниваются между двумя стратегиями, основанными на изменении интервала движения взвода k транспортных средств с разворотом и интервала движения взвода l транспортных средств основной полосы движения. Результаты численного моделирования показывают, что наиболее подходящая стратегия управления будет меняться при изменении интервала движения между транспортными средствами с разворотом или транспортными средствами на основной полосе. (3) Система моделирования клеточного автомата, состоящая из четырехполосного двустороннего транспортного потока. с возможностью разворота посреди дороги устанавливается со встроенным алгоритмом кооперативного управления.Интенсивность движения на разных полосах сравнивается до и после совместного управления слиянием путем анализа скорости прибытия транспортных средств с основной полосы и разворота и их взаимосвязи друг с другом. Результаты показывают, что совместное управление может улучшить транспортный поток, но когда скорость прибытия основных полос достигает 0,7, улучшение не будет очевидным, что даже хуже, чем при отсутствии управления.
Результаты показывают, что совместное управление может улучшить транспортный поток, но когда скорость прибытия основных полос достигает 0,7, улучшение не будет очевидным, что даже хуже, чем при отсутствии управления.
Наконец, важно отметить, что при фактическом поведении автомобиля при развороте необходимо учитывать множество факторов, таких как размер проема и форма зоны ожидания.И в этом документе предполагается, что все транспортные средства являются автоматическими, но вскоре движение будет состоять из смеси оборудованных и необорудованных транспортных средств, и необходимо разработать системы управления, которые можно будет использовать в этот переходный период.
Доступность данных
Данные не использовались для поддержки этого исследования.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов в связи с публикацией данной статьи.
Благодарности
Работа выполнена при поддержке Фонда гуманитарных и социальных наук Министерства образования в рамках гранта №. 19ЯЖЦЖ289.
19ЯЖЦЖ289.
Правила дорожного движения — Курсы повышения квалификации
Для многих водителей прошло много лет или даже десятилетий с тех пор, как они задумывались о своих знаниях правил дорожного движения. Здесь мы рассмотрим некоторые правила, применимые к поворотам транспортных средств.
Повороты
Левые повороты
• При повороте налево на перекрестке расположите автомобиль ближе к дальнему левому краю дороги.
• Если есть полоса объезда, левый поворот должен выполняться с полосы объезда.
Поворот налево на многополосной дороге со стрелками.
Когда вы поворачиваете налево на перекрестке с многополосной дороги, вы должны подъезжать и въезжать на перекресток с левой полосы, за исключением случаев, когда:
• для левых поворотов имеется объездная полоса
• в левой полосе имеется препятствие
• дорожная разметка позволяет выполнять поворот с другой полосы
Правые повороты
При повороте направо на дорогу с двусторонним движением держитесь левее центра дороги, на которую вы въезжаете. Если дорога отмечена линиями поворота, чтобы показать путь при повороте, следуйте линиям поворота.
Если дорога отмечена линиями поворота, чтобы показать путь при повороте, следуйте линиям поворота.
Поворачивая направо с улицы с односторонним движением , подъезжайте к перекрестку, держа автомобиль ближе к правой стороне и параллельно обочине.
При повороте направо с улицы с односторонним движением необходимо повернуть, как указано стрелками.
Поворот с однополосной дороги на многополосную. Вы можете выбрать, на какую полосу повернуть, если нет отмеченных линий поворота, указывающих конкретный путь. Вы должны уступить дорогу транспортным средствам на полосе, на которую вы поворачиваете, или пешеходам, переходящим дорогу, на которую вы въезжаете.
Поворот направо на немаркированных перекрестках
Когда вы поворачиваете направо с дороги с двусторонним движением на немаркированном перекрестке, проезжайте направо от центра перекрестка, если линии поворота не указывают иначе.
Применяются правила уступить дорогу.
Вы должны делать разворот только в случае необходимости.
Вы можете сделать разворот, если:
• вы хорошо видите приближающийся транспорт
• вы уступаете дорогу всем транспортным средствам и пешеходам, в том числе транспортным средствам, движущимся лицом к знакам «СТОП» или «Уступите дорогу»
• вы можете безопасно развернуться не препятствуя свободному движению транспорта
• отсутствуют знаки и дорожная разметка, запрещающие разворот.
Не делайте разворот на светофоре, если нет знака, запрещающего это делать.
Поворот через окрашенные островки безопасности
Вы можете проехать по нарисованному острову, окруженному одной непрерывной линией, длиной до 50 м, чтобы выехать или съехать с дороги
или выехать на поворотную полосу, которая начинается сразу после окрашенного острова.
Вы не должны двигаться по нарисованному островку или над ним, окруженному одной непрерывной линией, если остров находится в точке слияния и разделяет транспортные средства, движущиеся в одном направлении, или если остров разделяет части дороги, образуя полосу объезда.
Источник: Ваши ключи от вождения в Квинсленде, апрель 2019 г. № 18.3
ГОРОД Аль-НАДЖАФ КАК ПРИМЕР ПРИМЕРА
Kufa Journal of Engineering (K.J.E) ISSN 2207-5528 Vol. 6, выпуск 1, декабрь 2014 г. Отпечатано в Ираке
131
[12] Ким, Т., Эдара, П ; Баред, Дж. (2006 г.) «Эксплуатационные характеристики и безопасность конструкции нетрадиционного перекрестка
: суперулица. Совет по исследованиям в области транспорта
86-е ежегодное собрание.
[13] Левинсон, Х.С., Кёпке, Ф.Дж., Гейнер, Д., Аллин, Д. и Далумбо С. (2000), «
Косвенные левые повороты: опыт Мичигана». Proc., 4-я Национальная конференция по управлению доступом
, Портленд.
[14] Левинсон Х. и Глюк Дж.(2000) «Экономические последствия медиан: эмпирический подход
». Proc., 4-я Национальная конференция по управлению доступом, Портленд.
[15] Лю П. (2006 г.) «Оценка эксплуатационных эффектов движения с разворотом». (PhD
Dissertation), Университет Южной Флориды, США.
[16] Лу, Дж., Диссанаяке, С., Сюй, Л. и Уильямс, К. (2001 г.), «Оценка безопасности правых поворотов —
, за которыми следуют развороты как альтернатива прямому повороту налево: авария». Анализ данных.
Отчет представлен в Департамент транспорта Флориды Южного университета
Флорида.
[17] Маки, Р. Э., (1996) «Направленные кроссоверы: предпочтительная стратегия левого поворота в Мичигане».
Proc., 75-е ежегодное собрание Совета по транспортным исследованиям. Вашингтон, округ Колумбия.
[18] Мауга, Т.(2010) «Анализ и оценка воздействия на безопасность срединных типов и
Обработки левого поворота в середине блока для городских магистралей». (докторская диссертация), Университет
Невада, Лас-Вегас.
[19] Патрик, В., Шанкар, В. и Чайанан, С. (2002) «Экономические последствия управления доступом
», отчет об исследовании, представленный для Транспортной комиссии штата Вашингтон
, Департамент транспорта.
[20] Пиринччиоглу, Ф. (2007) «Воздействие правых поворотов с последующим разворотом на безопасность» (докторская диссертация
), Университет Южной Флориды, Тампа.
[21] Potts, I., Harwood, D., Torbic D., Richard, K., Gluck, J., and Levinson, H. (2004)»,
Безопасность разворотов при несигнализированном срединном открытии », Отчет НЦПЧП 524.National
Cooperative Highway Research Program, TRB, National Research Council,
Washington, DC
[22] Rees, M., Orrick, T., and Marx, R., (2000) «Police Power Regulation of Highway
Доступ и транспортный поток в штате Канзас», Proc., 79th Annual Meeting of
Transportation Research Board, Washington D.C.
[23] Шихан, Х., и Мохаммед, Х. (2009) «Исследования системы дорожного движения на срединном развороте в
городе Багдад с использованием модели U-SIM», Journal of Engineering and Development,
Том 13, №1, стр. 226-237.
[24] Сисиопику В. и Эйлсворт-Бонзелет Л.