
Что входит в систему стабилизации движения и как она работает
16.01.2017
Система динамической стабилизации — одна из современных систем, которая во многом повышает уровень управляемости автомобилем. Благодаря наличию системы датчиков, она моментально анализирует ситуацию и помогает сохранить правильное положение авто на дороге.
Структура системы стабилизации
Система курсовой устойчивости ESP (Electronic Stability Program) это совокупность датчиков и приборов, которые решают одну общую задачу — сохранить стабильность движения автомобиля. Она во многом позволяет обезопасить водителя и уйти от возможных ситуаций ДТП.
В систему ESP входит:
- Управляющий блок (блок управления двигателем), который контролирует действие каждого прибора и анализирует состояние авто.
- Датчики АБС, основная задача которых — определять скорость вращения колес.
- Датчики, определяющие степень разворота рулевого колеса.
- Датчики, определяющие давление внутри тормозных цилиндров.

- G-сенсор, определяющий нюансы движения авто по дороге.

Все детали системы работают как единый механизм и обеспечивают максимально возможную стабильность при управлении авто.
Как работает система
Главная задача всей системы — предотвратить возможный занос авто и появление бокового скольжения. За счет моментального анализа положения происходит ряд действий, предотвращающих дальнейший занос. После этого авто возвращается в изначальное направление движения. При правильной работе система обеспечивает нужное направление движения относительно курса.
Эффективность данной системы подтверждена не только данными тест-драйвов, но и многочисленными исследованиями ученых, которые работают в этом направлении. Применение данной системы снизило количество дорожно-транспортных происшествий, а также уменьшило уровень смертности при авариях. Траектория движения автомобиля с этой системой значительно стабильнее, чем у самого опытного водителя.
Сама суть работы системы курсовой устойчивости состоит в анализе информации, поступающей от двух основных датчиков. При нормальном функционировании, система точно знает, с какой скоростью движется авто, куда водитель повернул руль и под каким углом едет авто. Это очень важная функция, которая может сохранить целостность авто при определенных условиях на дороге.
ESP на автомобилях — роскошь, или необходимость?
Многие автомобилисты спорят на тему того, нужно ли переплачивать, и зачем нужна система стабилизации курсовой устойчивости. Но факты говорят сами за себя. Данная система подтвердила свою значимость, и каждый водитель, который прочувствовал ее действие на себе, подчеркнет ее важность как средства для избегания ДТП.
Если вы решили стать обладателем такой системы, то спешим заметить, что установка ее обойдется весьма недешево. Причиной тому становится не только дороговизна оборудования, но и тот факт, что система стабилизации движения сложна в установке.
Если вы решили стать обладателем надежного автомобиля с системой стабилизации движения, то загляните в наш автосалон ДОЛАВТО. У нас вы найдете большой выбор авто с самыми современными системами ESP, а также получите подробную консультацию не только о работе данного прибора, но и каждой марке авто в отдельности. Обратите внимание на то, что данная система поможет обезопасить не только начинающего водителя, но и опытного шофера. Берегите себя, и не забывайте о безопасности на дорогах.
Электронная система стабилизации (ESC) – общие сведения | Система антиюза | Поддержка водителя | V60 2018
При торможении срабатывание системы ESC может восприниматься в виде пульсирующего звука. При подаче газа ускорение автомобиля может быть ниже ожидаемого.
Предупреждение
- Система устойчивости ESC является дополнительной функцией поддержки водителя, направленной на повышение удобства и безопасности управления автомобилем – однако она не может обеспечить необходимые действия во всех ситуациях и в любых транспортных, дорожных и погодных условиях.
- ESC не может заменить внимание и оценку ситуации водителем. Только водитель отвечает за безопасное поведение автомобиля на дороге, должен поддерживать подходящую скорость и расстояние до других транспортных средств и соблюдать действующие законы и правила дорожного движения.
Система ESC обладает следующими функциями:
- Функция антиюза
- Противобуксовочная функция
- Функция тягового усилия
- Контроль остановки двигателя – EDC
- Система распределения тягового усилия в повороте – СТС
- Стабилизатор прицепа автомобиля – TSA
Функция антиюза
Для повышения устойчивости автомобиля функция контролирует отдельно тяговое и тормозное усилие колес.
Противобуксовочная функция
Во время ускорения функция не допускает проскальзывание ведущих колес на дорожном покрытии.
Функция тягового усилия
Функция, действуя на низких скоростях, передает усилие с ведущего колеса, которое пробуксовывает, на ведущее колесо, которое не делает этого.
Контроль остановки двигателя – EDC
EDC (Engine Drag Control) препятствует внезапной блокировке колес, например, после понижения передачи или торможения двигателем при движении на низкой передаче по скользкому дорожному покрытию.
Внезапная блокировка колес во время движения может в том числе затруднить управление автомобилем.
Система распределения тягового усилия в повороте – СТС*
CTC компенсирует недоуправление и допускает повышение ускорения на поворотах без пробуксовки внутренних колес, например, при выезде на дорогу по кривой, чтобы автомобиль мог быстрее встроиться в существующий дорожный темп.
Стабилизатор прицепа автомобиля* – TSA
Trailer Stability Assist устанавливается вместе с оригинальным буксирным крюком Volvo.
Стабилизатор прицепа автомобиля предназначен для стабилизации автомобиля с прицепом в ситуациях, когда экипаж подвергается автоколебаниям. Дополнительную информацию см. Езда с прицепом.
Примечание
Функция отключается, когда водитель выбирает режим Sport.
Чем отличаются автомобильные системы стабилизации ESP и ESC
Особенности автомобильных систем ESP и ESC
Каждый новый автомобиль, проданный в Европе с 2014, должен быть оснащён электронной системой стабилизации, но далеко не все автовладельцы знают, чем отличаются ESP и ESC, а также на что влияет выбранный вариант.
Смотрите также: Что такое система векторизации крутящего момента и как она работает?
ESC (или ESP) многими рассматривается как одно из величайших достижений в области автомобильной безопасности и автоспорта в частности.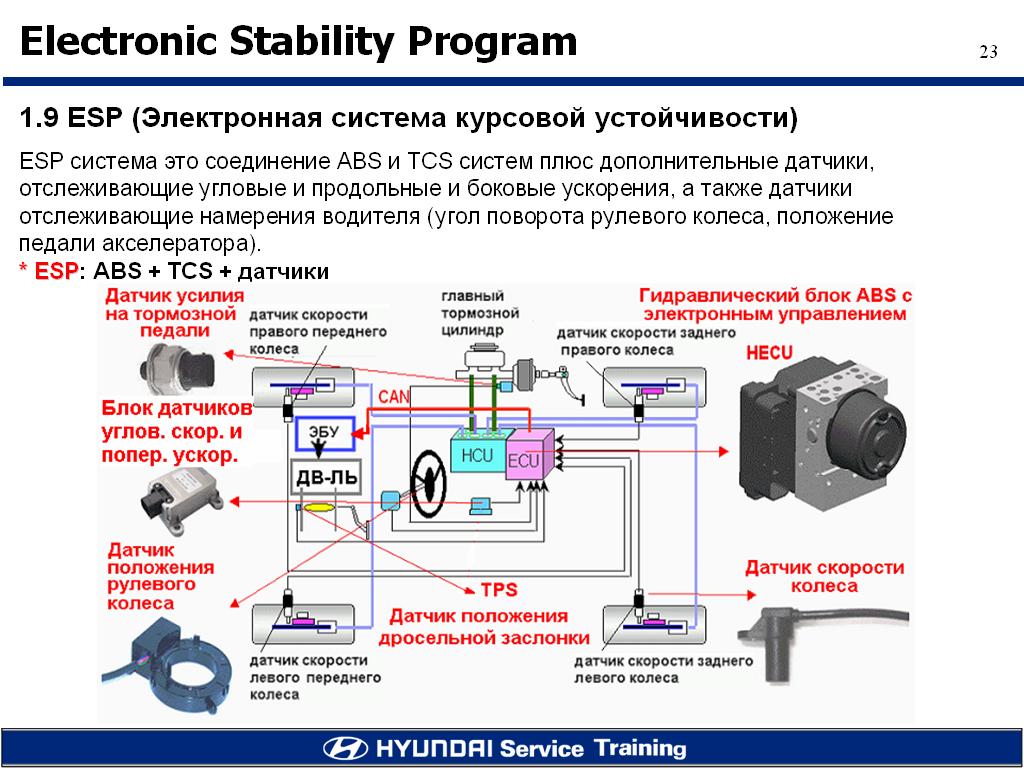 Принципиальное отличие системы стабилизации от таких традиционных элементов пассивной безопасности как ремни и подушки заключается в том, что они предназначены для спасения жизни, а также сохранения здоровья водителя и пассажира при аварии, а вот ESC (или ESP) используются для предотвращения ДТП.
Принципиальное отличие системы стабилизации от таких традиционных элементов пассивной безопасности как ремни и подушки заключается в том, что они предназначены для спасения жизни, а также сохранения здоровья водителя и пассажира при аварии, а вот ESC (или ESP) используются для предотвращения ДТП.
Для справки, ESC расшифровывается как Electronic Stability Control (Электронный Контроль Устойчивости), а ESP – Electronic Stability Program (Электронная Программа Стабилизации). Фактически, цели у обеих совпадают, а исследования и проверка опытным путём наглядно доказывают их эффективность. По мнению британских специалистов, которые основывались на статистических данных, оснащение автомобиля ESP помогает снизить риски серьёзного транспортного происшествия на 25%. В то же время шведские исследователи склонны полагать, что данная система активной безопасности помогает на 35% уменьшить вероятность попадания в аварию со смертельным исходом при плохих погодных условиях.
Это мрачная перспектива, которая, тем не менее, должна подвергаться тщательному анализу, именно поэтому в Европе на законодательном уровне закрепили обязательное оснащение всех новых автомобилей ESP. Такая инициатива была реализована в 2014 году, до этого момента столь важная система входила лишь в список дополнительного оборудования, доступного достаточно дорогим моделям. При этом прообраз данной электронной системы был запатентован ещё в 1959 году, а реализовать её на массовой серийной модели удалось только к 1994 году.
Такая инициатива была реализована в 2014 году, до этого момента столь важная система входила лишь в список дополнительного оборудования, доступного достаточно дорогим моделям. При этом прообраз данной электронной системы был запатентован ещё в 1959 году, а реализовать её на массовой серийной модели удалось только к 1994 году.
Как работают ESP и ESC
При таком количестве электронных систем, устанавливаемых в автомобиле, каждая из которых имеет собственную аббревиатуру, многие автовладельцы совершенно не понимают, в чём заключается принципиальное отличие между ними. Ещё больше усложняет ситуацию то, что для обозначения близких по назначению средств активной безопасности используются разные названия, которые в большинстве случаев определяются самим производителем.
Так, ESP (Electronic Stability Program) может быть известна как ESC (Electronic Stability Control), VSC (Контроль Устойчивости Автомобиля или система курсовой устойчивости), VSA (Vehicle Stability Assist – Система Курсовой Стабилизации) или DSC (Dynamic Stability Control – Система Динамического Контроля Устойчивости).
Итак, теперь мы определились с возможными вариантами названий, давайте посмотрим, как работает ESP.
Добавление третьего элемента безопасности к ABS и противобуксовочной системе
Для того, чтобы появилась возможность оснащения вашего автомобиля системой ESP, он должен быть оборудован ABS (антиблокировочная тормозная система) и TCS (Traction Control System – противобуксовочная система) В простейшем случае два этих элемента активной безопасности предназначены для того, чтобы улучшить управляемость и предсказуемость, а также сохранять контроль над автомобилем при торможении и ускорении соответственно, поэтому их вмешательство в процесс управления сводится лишь к контролю линейного ускорения.
ESP дополняет их и вносит третье контролируемое измерение, поскольку она отвечает за перемещение автомобиля в перпендикулярном траектории движения направлении, в котором и возникают такие явления как недостаточная или избыточная поворачиваемость – занос.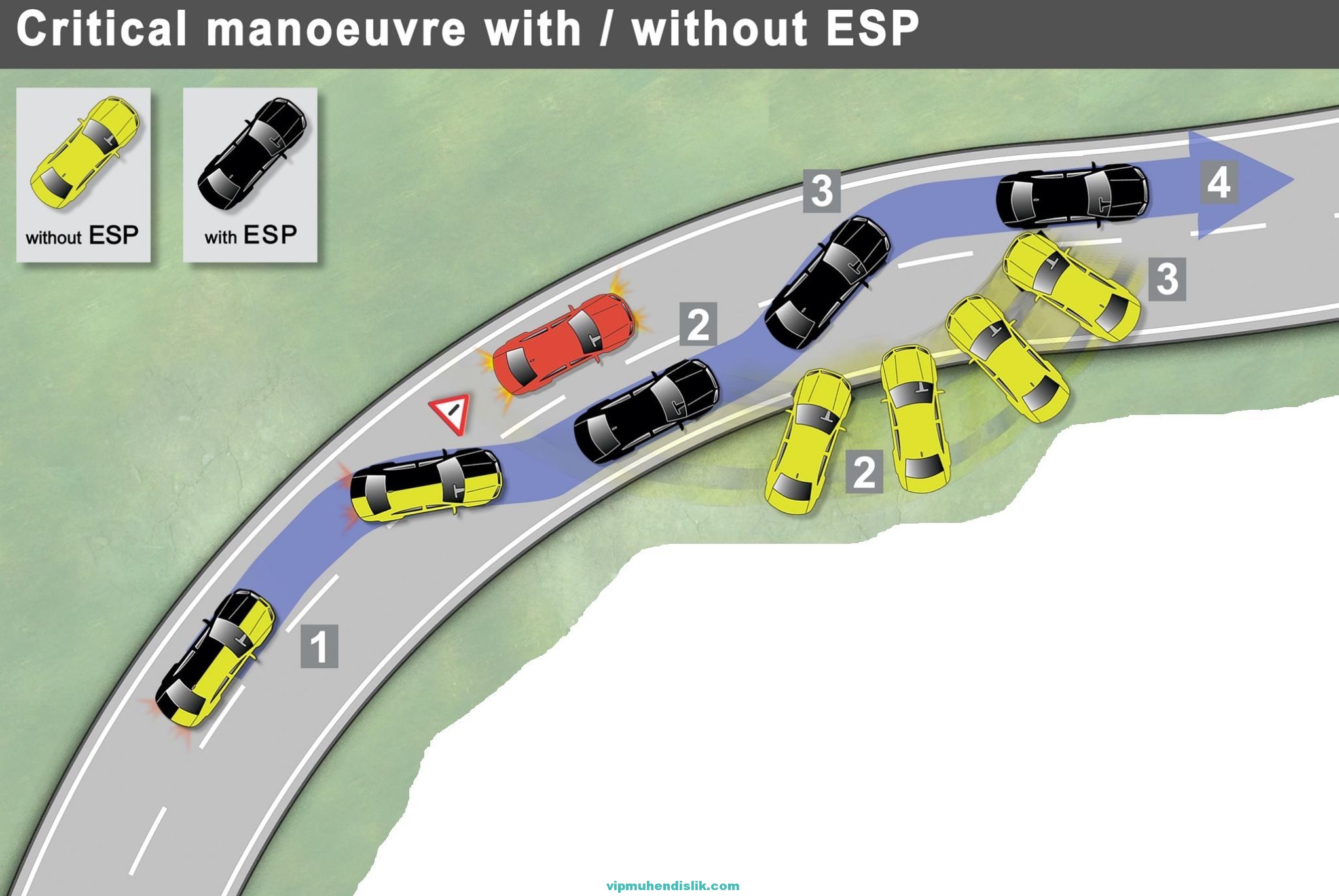 В более продвинутых версиях она находится в постоянном взаимодействии и с электронным блоком управления двигателем, чтобы максимально повысить эффективность своей работы.
В более продвинутых версиях она находится в постоянном взаимодействии и с электронным блоком управления двигателем, чтобы максимально повысить эффективность своей работы.
Согласно статистическим данным, ESP может предотвратить до 80% заносов, что является отличным показателем, особенно на фоне того, что около 40% аварий происходит именно из-за этого явления. Тем не менее, стоит вспомнить слова Скотти из фильма Стартрек: «Вы можете изменить законы физики!». Конечно, возможности систем активной безопасности не безграничны и об этом не стоит забывать. Если водитель перешагнёт тот рубеж, когда потеря контроля над автомобилем неизбежна, ни одна из существующих ныне систем не позволит предотвратить серьёзные последствия.
Дополнительная устойчивость при повороте с ESC
Поскольку ESP обеспечивает дополнительную безопасность наряду с ABS и TCS, вас вряд ли удивит тот факт, что она использует большую часть оборудования из этих систем для работы. Используя датчики для измерения скорости отдельных колес, а также информацию от датчиков бокового ускорения и датчиков поперечной скорости, блок управления ESP постоянно контролирует боковые движения автомобиля и сопоставляет их с положением рулевого колеса. Если машина не отреагирует на движение руля так, как это запрограммировано, или заданный угол поворота, а также скорость слишком велики, ESP начнёт подтормаживать колёса, пытаясь сохранить прямолинейную траекторию движения. При этом торможение осуществляется при активном взаимодействии с ABS, что исключает блокировку одного из колёс. Сама суть работы рассматриваемой системы заключается в том, чтобы начать активно содействовать процессу управления машиной ещё до того момента, как водитель поймёт, что начинает терять контроль.
Используя датчики для измерения скорости отдельных колес, а также информацию от датчиков бокового ускорения и датчиков поперечной скорости, блок управления ESP постоянно контролирует боковые движения автомобиля и сопоставляет их с положением рулевого колеса. Если машина не отреагирует на движение руля так, как это запрограммировано, или заданный угол поворота, а также скорость слишком велики, ESP начнёт подтормаживать колёса, пытаясь сохранить прямолинейную траекторию движения. При этом торможение осуществляется при активном взаимодействии с ABS, что исключает блокировку одного из колёс. Сама суть работы рассматриваемой системы заключается в том, чтобы начать активно содействовать процессу управления машиной ещё до того момента, как водитель поймёт, что начинает терять контроль.
Система работает постоянно, вне зависимости от режима езды, и даже при движении накатом. А механизм её влияния полностью зависит от ситуации и конструктивных особенностей автомобиля. Например, если в резком повороте фиксируется начало проскальзывания задней оси, то электроника начинает плавно снижать количество подаваемого в двигатель топлива, обеспечивая снижение его оборотов. Если же и этого оказывается недостаточно, то начинается постепенное подтормаживание передних колёс. Если же автомобиль оснащён автоматической трансмиссией, то ESP позволяет принудительно активировать зимний режим работы, обеспечивая возможность перехода на пониженную передачу.
Если же и этого оказывается недостаточно, то начинается постепенное подтормаживание передних колёс. Если же автомобиль оснащён автоматической трансмиссией, то ESP позволяет принудительно активировать зимний режим работы, обеспечивая возможность перехода на пониженную передачу.
Дополнительные преимущества ESC
Поскольку ESC способен тормозить колеса автомобиля независимо от нажатия педали, она открывает огромный потенциал для реализации и внедрения других различных технологий безопасности. К ним можно отнести и достаточно известную ныне Brake Assist, предназначенную для сокращения тормозного пути, которая распознаёт ситуацию экстренного торможения и оказывает необходимое содействие водителю. А также Hill Hold Control, суть которого заключается в помощи при трогании в гору путём подтормаживания колёс на пару секунд после отпускания педали, чтобы предотвратить откатывание назад. Всё это ещё на несколько шагов приближает тот момент, когда электроника полностью заменит водителя.
Смотрите также: Технологии которые появились на авторынке благодаря Mercedes S-классу
Коммерческие автомобили, оснащенные ESC, могут иметь дополнительные датчики, которые измеряют вес и положение груза, и соответственно адаптировать поведение автомобиля под конкретные условия. Это повышает степень участия ESC в управлении автомобилем, поскольку в этом случае появляется даже возможность контроля над сдвигом груза при резком повороте. Данная система также обеспечивает дешевый и эффективный мониторинг давления в шинах, поскольку она измеряет скорость каждого отдельного колеса и может определить, снизилось ли давление в шине, поскольку это повлияет на скорость её вращения.
Помимо этого, не стоит забывать и о том, что данная электронная система позволяет ощутимо снизить показатель среднего расхода топлива за счёт оптимизации режимов работы двигателя и предотвращения затрат энергии при проскальзывании одной из осей. Конечно, обилие электроники существенно усложняет конструкцию автомобиля, повышает его стоимость и приводит к необходимости высококвалифицированного сервисного обслуживания, однако, как показывает история, массовое внедрение какой-либо технологии автоматически приводит к постепенному снижению её цены.
В ряде случаев при неоднородном покрытии (например, крупном щебне) или при движении с малой скоростью по сыпучему песку эта система оказывается неэффективна и даже негативно влияет на параметры работы автомобиля. Поэтому большинство автомобильных инженеров сходится во мнении, что такая полезная опция всё ещё нуждается в доработке, а пока необходимо предусмотреть возможность её деактивации, особенно на спортивных моделях и внедорожниках. Например, VSC от Toyota начинает работать только при достижении скорости 15 км/час.
Смотрите также: Силовое подруливание на переднеприводных машинах, способы решить проблему
Подводя итог, можно сказать, что ESP в различных вариациях исполнения предназначена для исправления ошибок недостаточно опытного водителя, чтобы предотвратить катастрофические последствия. Однако для тех, кто предпочитает активную езду и обладает для этого достаточными навыками, электроника снижает удовольствие от вождения, поскольку не позволяет довести ситуацию до критической грани, на которой и достигается управляемый занос, дрифт, прохождение поворотов «веером» и многое другое.
Именно поэтому на ряде моделей, особенно спортивных автомобилей, предусмотрена возможность настройки параметров под индивидуальные особенности владельца и даже отключения этой функции.
Автор: Сергей Василенков
Правильным курсом: системы стабилизации
1 января 2016 года в России вводится требование к обязательному оснащению системой курсовой устойчивости всех новых типов коммерческих автомобилей, автобусов и прицепной техники. Что представляет собой современное поколение ESC (Electronic Stability Control), предлагаемое глобальными поставщиками автомобильных технологий?
Михаил Ожерельев
Электронный контроль устойчивости или динамическая система стабилизации автомобиля — активная система безопасности транспортного средства, позволяющая предотвратить занос посредством индивидуального управления тяговым и тормозным моментом на каждом колесе. Этот электронный помощник водителя срабатывает в самых опасных ситуациях, когда возможна или уже произошла потеря управления автомобилем. Движение стабилизируется путем автоматического дозированного торможения каждого колеса.
Движение стабилизируется путем автоматического дозированного торможения каждого колеса.
Первая система электронной курсовой устойчивости была создана в 1995 году, а сегодня 78 % новых пассажирских и легких грузовых транспортных средств в Европе оснащается данным техническим решением. Динамическая система стабилизации является обязательной для всех транспортных средств, разрешенных к эксплуатации с 2011 года. С прошлого года электронный контроль устойчивости больше не считается дополнительным компонентом, а включается в стандартную комплектацию всех новых автомобилей в странах Евросоюза (в США система обязательна к установке на всех автомобилях массой до 4,5 т.).
Cистемы активной безопасности WABCO предотвращают до миллиона критических ситуаций в год по всему миру
В нашей стране требование к обязательному оснащению системой курсовой устойчивости всех новых типов коммерческих автомобилей, автобусов и прицепной техники вводится 1 января 2016 года. Правда, в данном случае речь идет только о новых платформах, впервые получающих Одобрение типа транспортного средства. Впрочем, уже сегодня перспективное семейство магистральных грузовиков КАМАЗ с кабиной Axor (КАМАЗ-5490, -65206, -65207 и -65802) серийно оснащается подобным техническим решением.
Впрочем, уже сегодня перспективное семейство магистральных грузовиков КАМАЗ с кабиной Axor (КАМАЗ-5490, -65206, -65207 и -65802) серийно оснащается подобным техническим решением.
Эксперты называют систему электронного контроля устойчивости самым важным изобретением в сфере автомобильной безопасности после ремней безопасности. Она обеспечивает водителю лучший контроль над поведением автомобиля, следя за тем, чтобы он перемещался в том направлении, куда указывает поворот руля. По данным американского страхового института дорожной безопасности (IIHS) и Национального управления безопасностью движения на трассах NHTSA, примерно одна треть смертельных аварий могла бы быть предотвращена системой стабилизации автомобиля, если бы ей были оснащены все транспортные средства.
Крупнейшим мировым производителем систем электронной устойчивости является группа компаний Robert Bosch GmbH, которая предлагает их под торговой маркой ESP (Electronic Stability Program). В этом году исполняется 20 лет с момента разработки и внедрения программы ESP. В настоящее время в мире 55 % пассажирского и легкого коммерческого транспорта оснащены ESP от Bosch. Кроме Bosch производством электронных систем стабилизации занимаются еще десять компаний.
В настоящее время в мире 55 % пассажирского и легкого коммерческого транспорта оснащены ESP от Bosch. Кроме Bosch производством электронных систем стабилизации занимаются еще десять компаний.
Самым крупным игроком в сегменте тяжелого коммерческого транспорта является компания WABCO, предлагающая свой продукт под торговой маркой ESCsmart. Кстати, по собственным подсчетам компании, ее продукция ежегодно предотвращает до одного миллиона критических ситуаций с грузовым автотранспортом по всему миру.
Входящие в ESCsmart электронный блок управления и датчик угла поворота рулевого колеса легко устанавливаются на различные виды транспортных средств
Первая система ESCsmart появилась на рынке в 2009 году, а в 2014 году на международном грузовом салоне в Ганновере WABCO продемонстрировала усовершенствованный гидроблок ABS, интегрированный в систему ESCsmart. Другим новшеством, причем не только для компании, но и по отрасли в целом, стала интеграция электронной системы курсовой устойчивости ESCsmart с платформами легких и средних коммерческих автомобилей по всему миру. Гидравлическая тормозная система WABCO также дает возможность внедрения ряда общих вспомогательных функций: от противооткатной системы (HCC — Hill Hold Control) до автоматического контроля тяги на ведущих колесах (ATC — Automatic Traction Control).
Гидравлическая тормозная система WABCO также дает возможность внедрения ряда общих вспомогательных функций: от противооткатной системы (HCC — Hill Hold Control) до автоматического контроля тяги на ведущих колесах (ATC — Automatic Traction Control).
«Все эти технологии, включая также опережающую систему экстренного торможения OnGuardPLUS, систему предупреждения о покидании полосы движения OnLane, а также модульную платформу тормозной системы mBSR, в дальнейшем помогут индустрии коммерческого транспорта улучшить показатели безопасности грузовых автомобилей, автобусов и прицепов по всему миру», — отметил на пресс-конференции в рамках IAA 2014 Жак Эскулиер, председатель и главный исполнительный директор WABCO.
Радарный датчик системы OnGuard
WABCO активно работает на российском рынке. В рамках выставки «Комтранс — 2015» компания продемонстрировала систему ESCsmart, пригодную для работы как с гидравлическим, так и с пневматическим приводом тормозов. Данное решение обеспечивает движение транспортного средства в заданном направлении, помогает защитить его от опрокидывания и заноса, а в случае с автопоездом еще и уменьшает риск его складывания. Система ESCsmart автоматически вступает в работу и мгновенно реагирует на факторы, которые влияют на курсовую устойчивость транспортного средства, например, на изменение загрузки транспортного средства.
Система ESCsmart автоматически вступает в работу и мгновенно реагирует на факторы, которые влияют на курсовую устойчивость транспортного средства, например, на изменение загрузки транспортного средства.
Для оценки фактических параметров движения автомобиля используется информация c существующих датчиков системы ABS, регистрирующих тормозное давление, скорость движения автомобиля и угловые скорости колес. Помимо этого к ESC подключаются датчик угла поворота рулевого колеса и сенсоры продольного и поперечного ускорения. Главный контроллер ESC — это два микропроцессора, каждый из которых имеет большой объем оперативной памяти. Система позволяет считывать и обрабатывать значения, выдаваемые датчиками скорости вращения колес с 20-миллисекундным интервалом.
Камера системы OnLane
Как утверждают в WABCO, система ESCsmart выгодна автопроизводителям благодаря тому, что она облегчает процесс сборки и настройки транспортного средства с системой курсовой устойчивости, а также снижает время вывода новых моделей на рынок.
Несколько слов о сотрудничестве с российским автопромом. В сентябре WABCO анонсировала заключение соглашения о долгосрочном сотрудничестве с одним из ведущих российских производителей коммерческого транспорта. Имя этого производителя в пресс-релизе не сообщается. Известно только, что уже более десяти лет WABCO поставляет этому российскому заказчику инновационные технологии в области тормозных систем, систем обеспечения устойчивости и управления подвеской.
Гидравлическая система ABS в интеграции с ESCsmart
Добавим, что WABCO получила статус исключительного поставщика на основе результатов тендера. Этому способствовали возможности компании предложить комплекс как высокотехнологичных, так и традиционных систем, производимых в странах с низкой себестоимостью производства, в результате чего стала возможна поставка продукции высокого качества при оптимальной эффективности затрат. Кроме того, местные инженеры WABCO поддерживают этого заказчика на протяжении всего жизненного цикла продукции, включая этапы разработки, испытаний и сертификации техники.
Хочу получать самые интересные статьи
Система динамической стабилизации | Автомобильный справочник
Система динамической стабилизации предназначена для контроля поперечной динамики автомобиля и предотвращение срыва автомобиля в занос и боковое скольжение посредством компьютерного управления моментами силы колес. Иногда эту систему называют «противозаносной» или «системой поддержания курсовой устойчивости». Она способна компенсировать ошибки водителя, нейтрализуя и исключая занос, когда контроль над автомобилем уже потерян.
Содержание
Функции системы динамической стабилизации
Причиной большого числа ДТП является человеческий фактор. Даже при обычных условиях движения водитель и автомобиль могут достигнуть своих физических пределов вследствие, к примеру, неожиданного поворота дороги, внезапно появившегося препятствия или непредвиденного изменения состояния дорожного покрытия. Увеличение скорости также может привести к потере водителем уверенного контроля над автомобилем, если силы поперечного ускорения, воздействующие на автомобиль, в такой ситуации достигнут уровня, требующего от водителя слишком больших усилий.
Увеличение скорости также может привести к потере водителем уверенного контроля над автомобилем, если силы поперечного ускорения, воздействующие на автомобиль, в такой ситуации достигнут уровня, требующего от водителя слишком больших усилий.
При резком изменении сцепления шин с дорогой автомобиль внезапно начинает вести себя не так, как ожидает водитель, исходя из своего опыта. В таких экстремальных ситуациях водитель зачастую уже не способен самостоятельно стабилизировать автомобиль; как правило, в состоянии паники он своими действиями лишь усугубляет потерю устойчивости. В результате образуется значительное расхождение между продольным движением автомобиля и его продольной осью (угол дрейфа β). Даже путем поворота рулевого колеса в противоположном направлении обычный водитель сможет самостоятельно восстановить устойчивость лишь при угле дрейфа не более 8°.
Система динамической стабилизации (ESP) — именно под этим названием компания Bosch вывела на рынок свою систему управления динамикой движения — вносит значительный вклад в преодоление таких ситуаций, помогая водителю сохранить управляемость автомобиля в физических рабочих пределах. Датчики постоянно фиксируют поведение и водителя, и автомобиля. Путем сравнения фактического состояния с заданным, подходящим к той или иной ситуации, в случае значительных расхождений система вмешивается в работу тормозной системы и силового агрегата для стабилизации автомобиля (рис. «Боковая динамическая реакция легкового автомобиля с ESP» ).
Датчики постоянно фиксируют поведение и водителя, и автомобиля. Путем сравнения фактического состояния с заданным, подходящим к той или иной ситуации, в случае значительных расхождений система вмешивается в работу тормозной системы и силового агрегата для стабилизации автомобиля (рис. «Боковая динамическая реакция легкового автомобиля с ESP» ).
Встроенная функциональность антиблокировочной системы (ABS) предотвращает блокирование колес при нажатии на тормоз, в то время как аналогично интегрируемая система управления тяговым усилием (TCS) предотвращает пробуксовывание колес при трогании с места и разгоне. ESP — это комплексная система, охватывающая возможности, выходящие далеко за рамки ABS и комбинации ABS и TCS. Эта система предотвращает отклонение автомобиля от курса с заносом задней оси (избыточная поворачиваемость) или передней оси (недостаточная поворачиваемость), автомобиль слушается руля в рамках физически возможного.
Система ESP базируется на испытанных и зарекомендовавших себя компонентах систем ABS и TCS. Таким образом, можно активно тормозить воздействуя на отдельные колеса с высоким уровнем динамической реакции. На крутящий момент двигателя и, соответственно, тягу и пробуксовывание колес можно повлиять с помощью системы управления двигателем. Эти системы сообщаются между собой, к примеру, по шине CAN.
Требования к системе динамической стабилизации
Система динамической стабилизации (ESP) помогает повысить безопасность дорожного движения. Она улучшает поведение автомобиля на дороге в рамках физически возможного. Реакция автомобиля остается предсказуемой для водителя, и автомобиль становится более управляемым в критических ситуациях.
В рамках физических возможностей автомобиля курсовая устойчивость автомобиля улучшается во всех состояниях — при полном и частичном торможении, движении накатом, разгоне, обгоне и изменениях нагрузки, а также, к примеру, в случае экстремальных маневров (при панической реакции).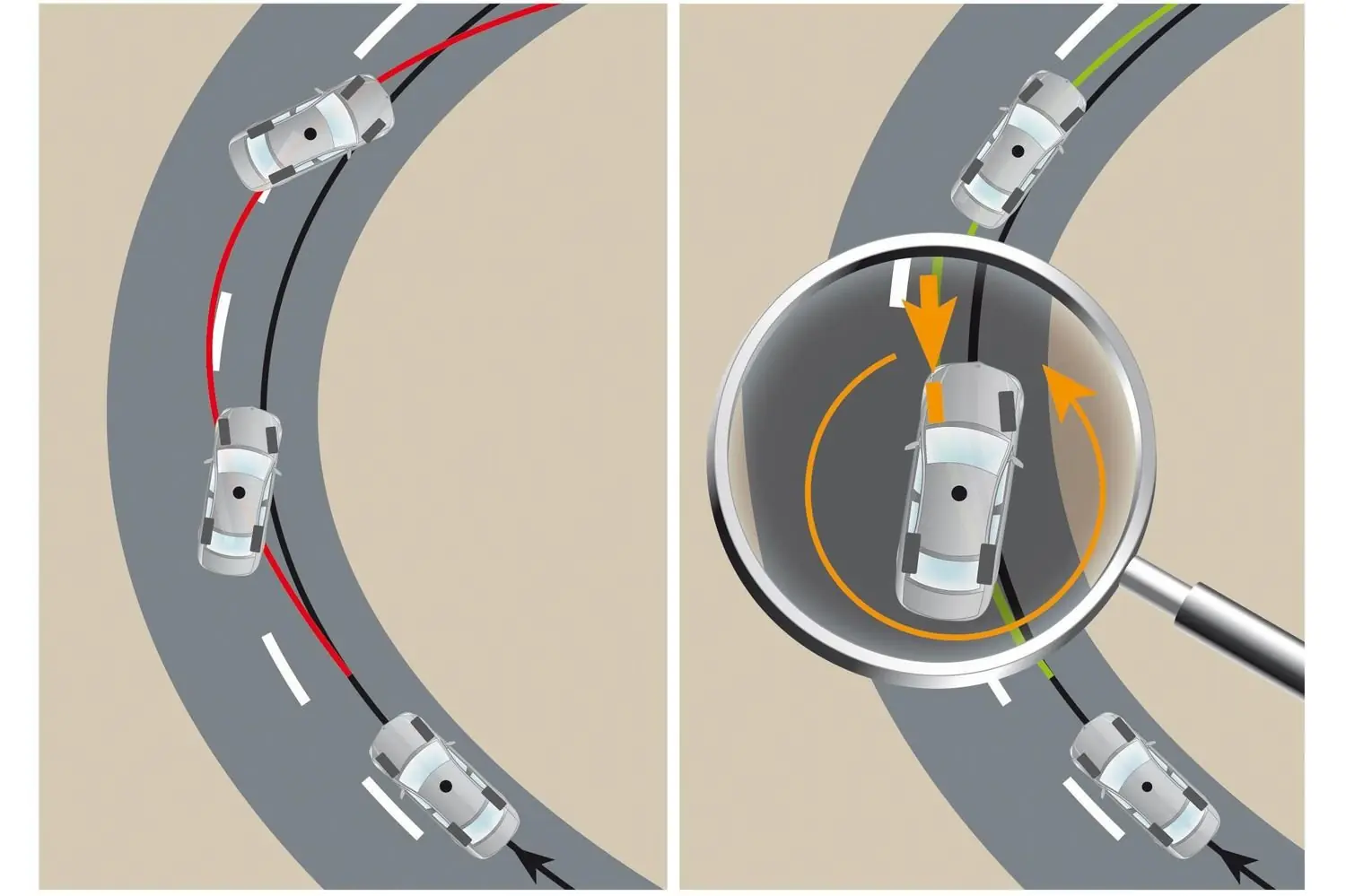 Значительно снижается риск заноса.
Значительно снижается риск заноса.
В ряде ситуаций эффективность торможения достигается путем использования тяговых характеристик при вмешательстве ABS и TCS, и когда активировано управление тяговым крутящим моментом двигателя (автоматическое увеличение оборотов двигателя для подавления избыточного тормозного момента двигателя). Это приводит к сокращению тормозного пути и увеличению тяги, улучшению устойчивости и повышению уровня чувствительности рулевого управления.
Некорректные вмешательства систем могут сказаться на безопасности. Комплексная концепция безопасности обеспечивает своевременное обнаружение всех неисправностей, которых не удается избежать, и система ESP полностью или частично отключается в зависимости от типа неисправности.
Многочисленные исследования показали, что ESP значительно снижает количество ДТП, вызванных заносом, и уровень смертности в ДТП. Как следствие, оснащение автомобилей системой ESP стало обязательным в США и Канаде с сентября 2011 года. В Евросоюзе (ЕС), все новые легковые автомобили и легкие грузовики должны оснащаться системой ESP с ноября 2011 года (неотъемлемая часть ECE-R 13Н). Для остальных новых автомобилей установлен переходный период до конца 2014 года. В других регионах, например, в Японии и Австралии, также будут вводиться такие требования.
В Евросоюзе (ЕС), все новые легковые автомобили и легкие грузовики должны оснащаться системой ESP с ноября 2011 года (неотъемлемая часть ECE-R 13Н). Для остальных новых автомобилей установлен переходный период до конца 2014 года. В других регионах, например, в Японии и Австралии, также будут вводиться такие требования.
Принцип действия системы динамической стабилизации
Система динамической стабилизации (ESP) использует тормозную систему автомобиля и силовой агрегат для коррекции продольного и поперечного движения автомобиля в критических ситуациях. Когда подключается система динамической стабилизации, она смещает приоритеты управления тормозной системой. Основная функция колесных тормозов-замедление и/или остановка автомобиля — становится вторичной по важности, поскольку происходит вмешательство ESP для сохранения курсовой устойчивости автомобиля. ESP может также ускорять приводные колеса путем вмешательства в работу двигателя, повышая устойчивость.
Оба механизма воздействуют на движение автомобиля. При движении по окружности в устойчивом состоянии существует определенная связь между усилиями на рулевом колесе и результирующим поперечным ускорением автомобиля и, соответственно, силами на шинах в поперечном направлении (эффект подруливания). Силы, воздействующие на шину в продольном и поперечном направлениях, зависят от пробуксовки шины. Это означает, что на движение автомобиля можно повлиять через скольжение шин. Торможение отдельных колес, например, заднего колеса на внутреннем радиусе поворота в случае недостаточной поворачиваемости или переднего колеса на внешнем радиусе поворота в случае избыточной поворачиваемости помогает как можно более точно выдержать заданную траекторию движения автомобиля.
Типичный маневр автомобиля
Чтобы сравнить, как автомобиль будет вести себя в экстремальной ситуации с ESP и без ESP, рассмотрим следующий пример. Маневр движения отражает текущую ситуацию и базируется на программах моделирования, разработанных на основе результатов испытаний. Результаты были подтверждены последующими дорожными испытаниями.
Результаты были подтверждены последующими дорожными испытаниями.
Быстрое маневрирование и выруливание
На рис. «Курсовая устойчивость во время последовательного прохождения правого/левого поворота» изображена реакция автомобиля без ESP и автомобиля с ESP при прохождении серии S-образных участков с быстрым маневрированием и выруливанием на дороге с высоким коэффициентом сцепления шин с дорогой (μ = 1), без притормаживания и на исходной скорости 144 км/ч. На рис. «Кривые динамической реакции при последовательном прохождении поворотов» изображены кривые параметров динамической реакции. В начале, при приближении к S-образному участку, условия для обоих автомобилей и их реакции идентичны. Затем водители начинают маневрировать (фаза 1).
Автомобиль без ESP
Как видно из рисунка, после начальной фазы резкое маневрирование у автомобиля без ESP уже угрожает потерей управляемости (рис. а, «Курсовая устойчивость во время прохождения поворотов» фаза 2). В то время как вращение руля быстро создало значительные поперечные силы на передних колесах, имеет место определенная задержка создания аналогичных сил на задних колесах. Автомобиль реагирует вращением по часовой стрелке вокруг своей вертикальной оси. Он лишь реагирует на попытки водителя вырулить (фаза 3), так как уже потерял управляемость. Резко возрастают скорость рыскания и угол бокового увода, и автомобиль срывается в занос (фаза 4).
а, «Курсовая устойчивость во время прохождения поворотов» фаза 2). В то время как вращение руля быстро создало значительные поперечные силы на передних колесах, имеет место определенная задержка создания аналогичных сил на задних колесах. Автомобиль реагирует вращением по часовой стрелке вокруг своей вертикальной оси. Он лишь реагирует на попытки водителя вырулить (фаза 3), так как уже потерял управляемость. Резко возрастают скорость рыскания и угол бокового увода, и автомобиль срывается в занос (фаза 4).
Автомобиль с ESP
Автомобиль с ESP стабилизируется после первоначального маневрирования путем активного торможения переднего левого колеса для устранения угрозы потери устойчивости (рис. b, «Курсовая устойчивость во время прохождения поворотов» фаза 2): это происходит без вмешательства водителя. Это действие ограничивает занос внутрь, уменьшая скорость рыскания и стабилизируя угол разворота при движении по инерции. После изменения направления поворота, свое направление сначала меняет момент, и затем — скорость вращения вокруг вертикальной оси (между фазами 3 и 4). В фазе 4, второе короткое нажатие на тормоз, на этот раз правого переднего колеса — полностью восстанавливает устойчивость. Автомобиль продолжает двигаться по траектории, заданной водителем.
После изменения направления поворота, свое направление сначала меняет момент, и затем — скорость вращения вокруг вертикальной оси (между фазами 3 и 4). В фазе 4, второе короткое нажатие на тормоз, на этот раз правого переднего колеса — полностью восстанавливает устойчивость. Автомобиль продолжает двигаться по траектории, заданной водителем.
Структура системы динамической стабилизации
Цель системы управления динамикой
Контроль характеристик управляемости в пределах физически возможного направлен на то, чтобы сохранить три степени свободы автомобиля в плоскости дороги — линейную скорость vx, поперечную скорость vy и скорость ψ вращения вокруг вертикальной оси — в контролируемых пределах. Задуманный водителем маневр преобразуется в динамическую реакцию автомобиля, адаптируемую к характеристикам дороги в рамках процесса оптимизации, нацеленного на обеспечение максимальной безопасности.
Структура системы и управления
Система ESP состоит из автомобиля как управляемой системы, датчиков, определяющих вводные переменные, исполнительных органов для коррекции тормозных, движущих и поперечных сил, а также иерархически структурированных контроллеров — контроллера поперечной динамики (высший уровень) и контроллеров колес (низший уровень) (рис. «ESP — общая система управления» ). Контроллер высшего уровня определяет заданные значения для контроллеров низшего уровня в виде моментов или скольжения или их изменений. Внутренние системные переменные, не измеряемые напрямую, такие как угол дрейфа β определяются при оценке условий движения.
Чтобы определить номинальное поведение, анализируются сигналы, соответствущие командам водителя. Оцениваются сигналы от датчика положения рулевого колеса, датчика давления в тормозной системе (желаемое замедление, получаемое из тормозного давления, измеренного в гидравлическом блоке) и положения педали акселератора (желаемый крутящий момент двигателя). При вычислении номинального поведения также учитывается используемый потенциал коэффициента сцепления шин с дорогой и скорость автомобиля. Эти параметры оцениваются на основе сигналов, получаемых от датчиков частоты вращения колес, датчика поперечного ускорения, датчика скорости вращения вокруг вертикальной оси и датчика давления в тормозной системе. Затем вычисляется момент относительно вертикальной оси, который необходим для приближенного приведения параметров действительного состояния к параметрам требуемого состояния.
При вычислении номинального поведения также учитывается используемый потенциал коэффициента сцепления шин с дорогой и скорость автомобиля. Эти параметры оцениваются на основе сигналов, получаемых от датчиков частоты вращения колес, датчика поперечного ускорения, датчика скорости вращения вокруг вертикальной оси и датчика давления в тормозной системе. Затем вычисляется момент относительно вертикальной оси, который необходим для приближенного приведения параметров действительного состояния к параметрам требуемого состояния.
В целях получения требуемого момента рыскания необходимо, чтобы изменения в величинах тормозного момента и относительного скольжения колес определялись посредством контроллера ESP. Эти величины затем устанавливаются контроллерами низшего уровня — контроллерами относительного скольжения и тягового усилия с помощью исполнительного механизма гидравлической тормозной системы и привода управления работой двигателя.
Оценка состояния движения
Для определения стабилизирующих вмешательств важно не только знать сигналы от датчиков угловых скоростей колес vwhl, давление на впуске рAdm, скорость вращения вокруг вертикальной оси поперечное ускорение ψ, угол поворота рулевого колеса δ и крутящий момент двигателя, но и ряд других внутренних системных переменных, которые могут быть измерены косвенно. К ним, к примеру, относятся силы, действующие на шины в продольном, поперечном и нормальном направлениях (Fx, Fy и Fn), линейная скорость vx, значения относительного скольжения шин λi, угол бокового увода колес а на одной оси, угол дрейфа β поперечная скорость автомобиля vy и коэффициент сцепления μ. Они определяются по сигналам датчиков на базе вычислительных моделей.
К ним, к примеру, относятся силы, действующие на шины в продольном, поперечном и нормальном направлениях (Fx, Fy и Fn), линейная скорость vx, значения относительного скольжения шин λi, угол бокового увода колес а на одной оси, угол дрейфа β поперечная скорость автомобиля vy и коэффициент сцепления μ. Они определяются по сигналам датчиков на базе вычислительных моделей.
Линейная скорость автомобиля vx имеет ключевую важность для всех контроллеров бокового увода колес и поэтому должна вычисляться с очень большой точностью. Это делается на основе автомобильной модели с использованием измеренных угловых скоростей колес. Здесь необходимо учитывать влияние многочисленных факторов. Скорость автомобиля vx уже в нормальных ситуациях вследствие торможения или пробуксовки отличается от линейных скоростей вращательного движения колес vwhl. У полноприводных автомобилей, в частности, необходимо учитывать особенности привода колес. На поворотах колеса, движущиеся по внутреннему радиусу, проходят по траектории, отличной от траектории колес на внешнем радиусе, следовательно, их скорости разные.
На поворотах колеса, движущиеся по внутреннему радиусу, проходят по траектории, отличной от траектории колес на внешнем радиусе, следовательно, их скорости разные.
Управляемость автомобиля меняется при обычной эксплуатации в ответ на изменения нагрузки, сопротивления движению (например, уклон дороги или изменение типа покрытия, ветер) или износ (например, тормозных колодок).
При всех этих граничных условиях линейная скорость автомобиля должна оцениваться с отклонением в несколько процентов для обеспечения стабилизирующего вмешательства в необходимой степени.
Контроллер поперечной динамики
Задачей контроллера поперечной динамики является вычисление фактического поведения автомобиля на основании, например, сигнала скорости вращения вокруг вертикальной оси и угла дрейфа, и сделать поведение автомобиля в экстремальной по динамике ситуации как можно более близким к поведению в обычной ситуации (номинальное поведение).
Связь, существующая при движении по окружности в устойчивом состоянии между скоростью вращения вокруг вертикальной оси и углом поворота рулевого колеса δ, линейной скоростью автомобиля vx и характеристическими переменными, используется для определения номинального поведения. Применяя одноколейную модель, получаем:
ψ = (vx / l) δ (1/ 1+(vx/vch)2)
в качестве базы для расчета номинального движения автомобиля. В этой формуле l означает расстояние между передней и задней осями. Геометрические и физические параметры модели автомобиля обобщены в «характеристической скорости автомобиля» vch.
В этом случае переменная ψ ограничивается соответственно текущим коэффициентам скольжения и конкретными свойствами динамики автомобиля и ситуации движения (инициируемые водителем торможение или разгон) и такими условиями, как наличие уклона или различие в коэффициентах скольжения (μ-разделение). Таким образом, команда водителя известна как номинальная скорость вращения вокруг вертикальной оси ψNom.
Таким образом, команда водителя известна как номинальная скорость вращения вокруг вертикальной оси ψNom.
Контроллер поперечной динамики сравнивает измеренную скорость вращения вокруг вертикальной оси с номинальной и в случае значительных отклонений вычисляет момент вращения вокруг вертикальной оси, необходимый для совпадения переменной величины фактического состояния с номинальным значением. На более высоком уровне контролируется угол дрейфа β и по мере роста значений все в большей степени учитывается в расчете стабилизирующего момента вращения вокруг вертикальной оси ΔMZ. Эта выходная переменная контроллера применяется посредством входных переменных тормозного момента и проскальзывания отдельных колес, корректируемых контроллерами нижнего уровня.
Стабилизирующие вмешательства выполняются на всех колесах, торможение которых генерирует момент вращения вокруг вертикальной оси в требуемом направлении вращения, и на которых еще не достигнут предел передаваемых сил. У автомобиля с избыточной поворачиваемостью физический предел сначала превышается на задней оси. Поэтому стабилизирующие вмешательства выполняются на переднем мосту. У автомобиля с недостаточной поворачиваемостью ситуация обратная.
У автомобиля с избыточной поворачиваемостью физический предел сначала превышается на задней оси. Поэтому стабилизирующие вмешательства выполняются на переднем мосту. У автомобиля с недостаточной поворачиваемостью ситуация обратная.
Номинальные значения относительного скольжения λ’Nom, запрашиваемые контроллером поперечной динамики, на отдельных колесах устанавливаются с помощью контроллеров колес, т.е. контроллеров низшего уровня (см. рис. «ESP — общая система управления» ). Различают следующие три случая.
Управление колесами при движении накатом
Чтобы создавать как можно более точные величины момента вращения вокруг вертикальной оси, необходимые для стабилизации автомобиля, силы на колесах должны изменяться при определенных условиях путем контроля проскальзывания колес. Номинальная величина проскальзывания, запрашиваемая контроллером поперечной динамики на том или ином колесе в случае отсутствия торможения регулируется контроллером проскальзывания путем активного нагнетания давления. Для этого нужно как можно более точно знать величину текущего проскальзывания колеса. Оно вычисляется на основе сигнала измеренной скорости колеса и линейной скорости автомобиля vx. Номинальный тормозной момент на колесе образуется из отклонения фактической величины проскальзывания от номинальной с использованием PID- регулирования (пропорционально-интегральнодифференциального регулирования).
Для этого нужно как можно более точно знать величину текущего проскальзывания колеса. Оно вычисляется на основе сигнала измеренной скорости колеса и линейной скорости автомобиля vx. Номинальный тормозной момент на колесе образуется из отклонения фактической величины проскальзывания от номинальной с использованием PID- регулирования (пропорционально-интегральнодифференциального регулирования).
Колесо может подвергаться торможению не только в случае активного нагнетания давления контроллером поперечной динамики. После переключения на пониженную передачу и резком отпускании педали газа инерция движущихся деталей двигателя в определенной степени тормозит приводные колеса. При увеличении этой силы и соответствующего реактивного момента сверх определенного уровня шины теряют способность передавать результирующие нагрузки на дорогу и у них появляется тенденция к блокированию (например, из-за внезапного наезда на скользкий участок дороги). Тормозное проскальзывание приводных колес можно ограничить в случае движения накатом посредством регулировки тормозного момента двигателя. Водителем это воспринимается как «плавный разгон».
Водителем это воспринимается как «плавный разгон».
Управление колесами при торможении
При торможении на отдельных колесах выполняются различные операции, в зависимости от ситуации:
- Вмешательство водителя через нажатие педали тормоза и вращение рулевого колеса;
- Эффект контроллера ABS, предотвращающего блокировку отдельных колес;
- Вмешательства контроллера поперечной динамики, обеспечивающие устойчивость автомобиля за счет подтормаживания отдельных колес, при необходимости.
Эти три требования должны координироваться таким образом, чтобы инициируемые водителем торможение и маневрирование реализовывались как можно полнее. Если управление колесами выполняется главным образом с целью максимального замедления автомобиля, то его можно выполнять на основании ускорения колес, надежно определеяемого по минимальной информации датчиков (управление неустойчивостью). Для регулировки продольных и поперечных сил на шине для стабилизации автомобиля необходимо применять принцип управления проскальзывания, так как он также позволяет управлять колесами в нестабильном диапазоне характеристики коэффициента сцепления / проскальзывания. Однако на основании имеющихся сигналов датчиков должна определяться абсолютная величина проскальзывания колеса до нескольких процентов, в зависимости от скорости автомобиля.
Однако на основании имеющихся сигналов датчиков должна определяться абсолютная величина проскальзывания колеса до нескольких процентов, в зависимости от скорости автомобиля.
Контроллер ABS
Задача контроллера ABS — обеспечить устойчивость и управляемость автомобиля в любых дорожных условиях и использование сцепления между шинами и дорогой в как можно большей степени. Будучи контроллером нижнего уровня по отношению к контроллеру поперечной динамики, он выполняет эти функции путем модулирования тормозного давления на колесе таким образом, чтобы обеспечивалась максимально возможная продольная сила при сохранении достаточной поперечной устойчивости. Однако в ESP измеряется больше переменных, чем в ABS, имеющей только датчики угловых скоростей колес. Таким образом, информация о движении колеса, такая как скорость вращения вокруг вертикальной оси или поперечное ускорение, получается путем прямого измерения с большей точностью, чем при модельной оценке на основании нескольких измеренных значений.
В определенных ситуациях можно повысить эффективность системы путем адаптации управления ABS посредством использования переменных из контроллера поперечной динамики. Когда автомобиль тормозит на неровной дороге (μ -разделение), на левых и правых колесах возникают очень разные тормозные силы. В результате возникает момент вращения вокруг вертикальной оси, на который водитель должен реагировать выруливанием, чтобы стабилизировать автомобиль. Скорость нарастания этого момента и быстрота последующей реакции водителя зависят от момента инерции автомобиля вокруг вертикальной оси. ABS вызывает задержку увеличения момента вращения вокруг вертикальной оси, сдерживая рост давления в колесном цилиндре переднего колеса с более высоким коэффициентом сцепления с дорожным покрытием. Эта функция ABS может также использовать информацию контроллера высшего уровня — контроллера поперечной динамики (по реакции водителя и поведению автомобиля) и, соответственно, даже еще лучше реагировать на фактическое движение автомобиля.
Если при торможении в повороте автомобиль при определенных условиях начинает поворачиваться, то тенденции к избыточной поворачиваемости можно противодействовать путем электронного распределения тормозных сил через уменьшение давления на отдельных колесах. Если этого недостаточно, то помогает контроллер поперечной динамики путем активного нагнетания давления на переднем колесе, движущемся по внешнему радиусу поворота (уменьшение поперечной силы). При недостаточной же поворачиваемости тормозной момент увеличивается на заднем колесе, движущемся по внутреннему радиусу поворота (при условии, что колесо не контролируется системой ABS) и слегка уменьшается на переднем внешнем колесе.
Если у автомобиля появляется тенденция к избыточной поворачиваемости при смене полосы с полным или частичным торможением, то уменьшается давление на заднем внешнем колесе (увеличение поперечной силы), и увеличивается давление на переднем внешнем колесе (уменьшение поперечной силы). При недостаточной поворачиваемости при торможении в повороте увеличивается тормозной момент в заднем колесе, движущемся по внутреннему радиусу поворота (при условии, что колесо еще не попало в диапазон вмешательства ABS) и слегка уменьшается на переднем внешнем колесе.
Управление колесами при активном движении
Как только приводные колеса начинают проскальзывать при активном движении, активируется контроллер низшего уровня — контроллер тягового усилия (TCS). На измеренную скорость колеса и соответствующее проскальзывания можно повлиять путем изменения баланса крутящего момента на каждом приводном колесе. Контроллер TCS ограничивает крутящий момент на каждом колесе до величины, которая может быть передана на дорогу. Таким образом, команда водителя реализуется после разгона настолько, насколько зто физически возможно, и одновременно обеспечивается фундаментальная курсовая устойчивость, так как слишком сильно уменьшаются боковые силы на колесе.
У автомобиля с активной осью в качестве регулирующих переменных используются средняя скорость колеса приводной оси.
vMWhl = 1/2 (vlWhl + vRWhl)
и разность скоростей vDif = vlWhl — vRWhl между левым vlWhl и правым vRWhl колесами.
Структура контроллера TCS изображена на рис. «Структура контроллера TCS». Опорные переменные контроллера поперечной динамики включаются в расчет номинального значения средней скорости колеса и разности скоростей колес, а также номинальных значений относительного скольжения и скоростей колес при движении накатом. При расчете номинальных значений vDifNom (номинальной разности скоростей приводных колес на одной оси) и vWhlNom (номинальной средней скорости колес), вводные переменные для изменения номинального относительного скольжения ΔλNom и допустимая разность величин относительного скольжения ΔλDlfTolNom приводной оси или осей корректируют базовые значения, вычисленные блоком TCS. Кроме того, тенденция к недостаточной или избыточной поворачиваемости, выявляемая контроллером поперечной динамики, через приращение номинального крутящего момента двигателя ΔМRedNom напрямую влияет на определение максимально допустимого приводного момента.
Динамическая реакция силового агрегата зависит от сильно изменяющихся режимов работы. Поэтому необходимо определить текущий режим работы (выбранная передача, включение сцепления), чтобы можно было адаптировать параметры контроллера к динамической реакции регулируемой системы и к не линейным характеристикам.
Поскольку на среднюю угловую скорость колеса влияют переменные инерционные силы, возникающие в приводе в целом (в двигателе, трансмиссии, на ведущих колесах, на карданном валу), то для описания её относительно медленной скорости динамической реакции используется относительно большая постоянная времени. Среднюю угловую скорость колеса контролирует нелинейный PID-контроллер, при этом, в частности, приращение l-компонента (в зависимости от режима работы) может варьироваться в широком спектре. В стационарном случае l-компонент является мерой крутящего момента, который может быть передан на колесо в точке контакта с поверхностью дороги. Выходной переменной этого контроллера является номинальный суммарный момент МMWhlNom.
И наоборот, постоянная времени для разности скоростей колес относительно мала и отражает тот факт, что собственные инерционные силы колес являются практически единственным определяющим фактором для динамической реакции. Кроме того, в отличие от средней скорости колес, двигатель влияет на неё лишь косвенно. Разность скоростей колес vDif контролируется нелинейным Pl-контроллером. Поскольку притормаживания приводного колеса вначале становятся заметными только через баланс крутящих моментов этого колеса, то они изменяют распределение межколесного дифференциала, имитируя его блокировку. Параметры этого контроллера блокировки межколесного дифференциала лишь в минимальной степени зависят от включенной передачи и влияний двигателя. Если дифференциальная скорость на приводной оси отличается от номинальной vDlfNom больше, чем это допустимо («мертвая зона»), то запускается вычисление номинального дифференциального момента MDlfNom. «Мертвая зона» расширяется, если тормозных вмешательств TCS необходимо избегать, например, при прохождении поворотов на пределах возможностей.
Номинальные дифференциальные крутящие моменты
Номинальный суммарный и номинальный дифференциальный крутящие моменты являются основой для распределения позиционирующих сил между исполнительными механизмами. Номинальный дифференциальный момент MDlfNom задается разностью между крутящими моментами на левом и правом ведущих колесах путем активации соответствующего клапана в гидравлическом блоке (ассиметричное вмешательство тормозов). Номинальный суммарный момент МMWhlNom регулируется как вмешательствами двигателя, так и симметричным вмешательством тормозов.
У бензинового двигателя регулировки, предпринимаемые через дроссельный клапан, относительно медленно дают эффект (задержка и переходная реакция двигателя). Для быстрого вмешательства через двигатель используются задержка момента зажигания и еще одна опция — селективное подавление импульсов впрыска. В дизельных двигателях электронный блок управления (EDC) уменьшает крутящий момент двигателя путем изменения количества впрыскиваемого топлива. Для краткосрочной помощи в уменьшении крутящего момента двигателя можно применять симметричное тормозное воздействие.
Во внедорожных условиях особую роль играет тяговое усилие. Обычно у внедорожников управление тяговым усилием автоматически адаптируется путем идентификации ситуации для достижения наилучших уровней эффективности и надежности. Другие автопроизводители дают водителю возможность выбрать различные регулировки, от деактивации ограничения крутящего момента двигателя до адаптации к особым состояниям дороги (лед, снег, трава, песок, снежная каша, каменистый грунт).
Дополнительные функции поперечной динамики
Описанные выше базовые функции ESP могут также включать в себя дополнительные функции поперечной динамики для особых категорий автомобилей, таких как полноприводные универсалы или внедорожники (SUV) и легкие фургоны, а также для особых требований к стабилизации автомобилей.
Расширенное управление недостаточной поворачиваемостью
Даже в нормальных условиях движения автомобиль может оказаться неспособным адекватно реагировать на вращение рулевого колеса (с образованием недостаточной поворачиваемости), если, к примеру, на повороте дорожное покрытие внезапно окажется мокрым или грязным. ESP может увеличить скорость вращения автомобиля вокруг вертикальной оси, создав дополнительный момент вращения. Это позволяет автомобилю пройти поворот с физически возможной максимальной скоростью. Ожидаемая частота вмешательств и требования к комфорту у разных типов автомобилей разные и поэтому имеются соответственно разные ступени расширения для выполнения таких тормозных вмешательств, которые влияют на поведение автомобиля при недостаточной поворачиваемости.
Если водитель захочет пройти поворот по меньшему радиусу, чем это физически возможно, то останется лишь уменьшение скорости автомобиля. Эту информацию можно считывать во время поворота в устойчивом состоянии по зависимости между радиусом поворота r, линейной скоростью автомобиля vx и скоростью вращения вокруг вертикальной оси ψ:
r = vx / ψ
Чтобы автомобиль оставался на заданной траектории, он — без применения момента вращения вокруг вертикальной оси — тормозится настолько, насколько это необходимо путем торможения всех колес (расширенное управление недостаточной поворачиваемостью, EUC).
Предотвращение опрокидывания
Легкие грузовики и другие автомобили с высоким центром тяжести, такие как внедорожники (SUV), могут перевернуться при возникновении больших поперечных сил, например, из-за резкого руления при маневрах уклонения от препятствия на сухой дороге (очень динамичные ситуации вождения) или при медленном увеличении поперечного ускорения автомобиля до критического при съезде с автострады с уменьшающимся радиусом поворота на слишком высокой скорости (почти стационарные ситуации вождения).
Существуют особые функции (функции подавления опрокидывания, RMF), выявляющие эти критические ситуации с помощью обычных датчиков ESP и стабилизирующих автомобиль путем вмешательства в работу тормозной системы и двигателя. Для обеспечения своевременного вмешательства, в дополнение к маневрирующим действиям водителя и измеренной реакции автомобиля (скорость вращения вокруг вертикальной оси и боковое ускорение), для оценки поведения автомобиля в ближайшем будущем используется прогнозирующая модель. В частности, при выявлении надвигающейся опасности опрокидывания притормаживаются два колеса на внешнем радиусе поворота. Это действие уменьшает поперечные силы на колесах и, соответственно, критическое поперечное ускорение. Управление колесами должно выполняться с таким высоким уровнем чувствительности, чтобы, несмотря на сильно колеблющиеся вертикальные силы FN, управляемость не ухудшалась из-за тенденции к блокированию отдельных колес, особенно при очень динамичных маневрах уклонения. Уменьшение скоростей колес при притормаживании отдельных колес также помогает водителю удержать автомобиль на своей полосе. В почти стационарных ситуациях движения точно выверенное уменьшение крутящего момента двигателя также не позволяет водителю спровоцировать критическую ситуацию.
Момент стабилизирующего вмешательства и его интенсивность должны быть как можно точнее адаптированы к текущему поведению автомобиля. Это поведение может значительно изменяться с нагрузкой, к примеру, в случае с легкими фургонами и внедорожниками с багажниками на крыше. Такие автомобили используют дополнительные оценочные алгоритмы, вычисляющие массу автомобиля и изменение центра тяжести, вызванное распределением нагрузки, если это требуется для адаптации функций ESP (управление с адаптацией к нагрузке, LAC).
Подавление раскачивания прицепа
В зависимости от скорости движения автомобили с прицепом подвержены раскачиванию вокруг вертикальной оси. Если автомобиль с прицепом или автопоезд движется со скоростью меньшей «критической» (обычно 90 км/ч и 130 км/ч), эти раскачивающие движения адекватно и быстро гасятся. Но если скорость оказывается выше, то небольшие повороты руля, боковой ветер или наезд на выбоину могут внезапно вызвать такие раскачивающие движения, которые быстро набирают интенсивность и в конечном счете могут привести к ДТП из-за складывания автопоезда.
Периодическая избыточная поворачиваемость вызывает стандартные стабилизирующие вмешательства ESP, но они обычно приходят поздно и сами по себе не способны стабилизировать автопоезд. Функция подавления раскачивания прицепа (TSM) своевременно выявляет раскачивающие движения на основе сигналов стандартных датчиков ESP; это делается посредством анализа скорости вращения тягача вокруг вертикальной оси на основе моделей, с учетом маневрирующих движений водителя. Когда эти раскачивающие движения достигают критического уровня, автопоезд автоматически тормозится для уменьшения скорости до такой степени, чтобы даже малейшее последующее возбуждение не вызвало немедленных критических колебаний. Чтобы как можно эффективнее погасить колебания в критической ситуации, в дополнение к симметричному торможению через все оси тягача выполняются притормаживания отдельных колес, быстро устраняющие раскачивание автопоезда. Ограничение крутящего момента двигателя предотвращает опасное ускорение автомобиля (инициируемое водителем) во время стабилизации.
Активация других исполнительных органов ESP
Наряду с использованием гидравлических колесных тормозов, предусмотрены и другие исполнительные механизмы, посредством которых можно влиять на динамику движения автомобиля. Когда активное рулевое управление и системы шасси соединяются с ESP, образуя комплексную систему- систему управления динамикой автомобиля (Vehicle Dynamics Management, VDM), они в комплексе могут даже лучше поддержать водителя, что еще больше повышает безопасность движения и динамику вождения.
В то время как сочетание системы стабилизации рулевого управления с тормозной системой появилось в последние несколько лет, системы для активации блокировки дифференциала в трансмиссии уже давно представлены на рынке. Большое количество таких систем означает, что соединение с ESP возможно во многих случаях. Дополнительный исполнительный механизм может быть активирован либо непосредственно из расширенной функции ESP (принцип взаимодействия), либо через отдельный ЭБУ, обменивающийся информацией с ЭБУ ESP (параллельный принцип).
В полноприводных автомобилях создаваемый двигателем момент распределяется между обеими осями через межосевой дифференциал (рис. «Концепция полноприводного автомобиля с ESP» ). Когда двигатель сначала приводит в действие одну ось, а другая ось соединена с двигателем через межосевой дифференциал, такая система называется зависимой. Если этот межосевой дифференциал представляет собой разомкнутый дифференциал (без блокировки), то приводной момент ограничивается при увеличении пробуксовки одной оси. В самом неблагоприятном случае при пробуксовке колеса не происходит движения вперед. В сочетании с ESP симметричные вмешательства торможением контроллера TCS на все колеса могут ограничить межосевую разность скоростей колес и тем самым добиться продольного блокирующего эффекта.
Управление тяговым усилием системы ESP может также сопоставляться с особыми принципами работы других типов межосевых дифференциалов, таких как Torsen и вязкие муфты. В принципе, все управляемые исполнительные механизмы привода должны иметь определенный блокирующий момент и динамическую реакцию при размыкании и смыкании, чтобы адаптировать к себе подруливающие свойства автомобиля.
Если привод автомобиля может быть вручную переключен в различные режимы, то ESP может автоматически подстроиться под выбранный водителем режим. Поскольку ESP базируется на индивидуальном управлении колесами, то взаимодействие с механическими блокировками дифференциала для езды по бездорожью возможно лишь при возможности автоматического размыкания блокировки дифференциала во время вмешательств контроллера поперечной динамики. В противном случае систему необходимо переключить на аварийный режим ABS, когда включена блокировка, потому что вмешательства системы динамической стабилизации на одном колесе затронут и другие колеса, если оси жестко соединены.
Блокираторы межосевого дифференциала
Наряду с простыми соединениями между двумя осями, имеются управляемые блокираторы межосевого дифференциала, в которых электрический или гидравлический исполнительный орган активирует муфту, тем самым адаптируя момент блокировки (рис. «Концепция полноприводного автомобиля с ESP» ). Таким образом, на основании информации ESP (скорости колес, скорость автомобиля, скорость вращения вокруг вертикальной оси, боковое ускорение и крутящий момент двигателя), и с учетом переменных, специфичных для исполнительного органа (таких как механическая нагрузка) можно оптимально адаптировать соотношение двух осей к текущей ситуации движения (динамический крутящий момент при межосевом распределении, DCT-C).
Пример на рис. «Влияние распределения момента привода на поведение автомобиля» показывает, как переменное распределение приводного момента влияет на поведение автомобиля. Если в случае риска избыточной поворачиваемости при прохождении поворота можно временно перебросить часть крутящего момента на переднюю ось, это необходимо делать лишь намного позже во избежание потери устойчивости, для уменьшения крутящего момента двигателя или даже стабилизации автомобиля вмешательством тормозной системы (показано максимально возможное перераспределение крутящего момента привода).Если автомобиль имеет тенденцию к недостаточной поворачиваемости, то её можно уменьшить путем смещения крутящего момента на заднюю ось. В обоих случаях достигается улучшение реакции автомобиля и повышение устойчивости. Пределы, в которых фактически возможно смещение крутящего момента привода, зависят от конфигурации конкретного привода.
Управляемый межколесный дифференциал на одной оси может быть активирован системой ESP по аналогичным линиям к гибкому соединению двух осей. В плане принципа работы система динамического распределения крутящего момента на колеса (Dynamic Wheel Torque Distribution, DWT) отличается лишь от блокировки межколесного дифференциала, выполняемой системой TCS через гидравлические колесные тормоза.
Однако такой дополнительный исполнительный орган в обычных ситуациях также активно распределяет момент привода между колесами одной оси. Это делается с минимальными потерями и с гораздо большей чувствительностью и комфортом, чем может быть достигнуто через управление тяговым усилием в сочетании с регулированием тормозного момента и уменьшением крутящего момента двигателя, учитывая износ гидравлического блока ESP.
Компоненты программы
Гидравлический блок, непосредственно подключенный к нему ЭБУ (добавочный ЭБУ) и датчики скорости работают в сложных условиях моторного отсека и колесных арок. Датчик вращения вокруг вертикальной оси и датчик бокового ускорения либо встраиваются в ЭБУ, либо, как датчик угла поворота, устанавливаются в салоне. На рис. «Компоненты ESP» показаны примерные места установки компонентов в автомобиле с электрическими и механическими соединениями.
Электронный блок управления
ЭБУ в виде печатной платы включает в себя, как и компьютер с двухъядерным процессором, все приводы и полупроводниковые реле для активации клапанов и насосов, а также интерфейсные контуры для обработки сигналов датчиков и соответствующие коммутирующие входы для дополнительных сигналов (например, выключатель стоп-сигнала). Имеются также интерфейсы (CAN, FlexRay) для сообщения с другими системами, такими как системы управления двигателем и трансмиссией.
Гидравлический блок
Гидравлический блок (также называемый гидравлическим модулятором), как в системах ABS или ABS/TCS, образует гидравлическое соединение между главным тормозным цилиндром и рабочими цилиндрами колесных тормозов. Он преобразует управляющие команды ЭБУ и через электромагнитные клапаны регулирует давление в колесных тормозах. Гидравлический контур выполняется в виде каналов в алюминиевом блоке. Этот блок также используется для размещения необходимых элементов гидравлической функции (электромагнитных клапанов, плунжерных насосов и камер-аккумуляторов).
В системе ESP должно быть 12 клапанов независимо от конфигурации тормозных контуров (рис. «Схема гидравлического блока ESP (х-образная конфигурация тормозных контуров» ). Кроме того, обычно встраивается датчик давления, измеряющий инициируемое водителем замедление через тормозное давление в главном тормозном цилиндре. Это повышает эффективность стабилизации автомобиля при частично активных маневрах. Давление модулируется при регулировании со стороны ABS (пассивное регулирование) с помощью гидравлики ESP точно так же, как было описано для системы ABS.
Но поскольку системы ESP также должны активно нагнетать давление (активное регулирование) или повышать тормозное давление, создаваемое водителем (частично активное регулирование), используемый в ABS возвратный насос заменяется самовсасывающим насосом для каждого контура. Рабочие цилиндры тормозных механизмов колес и главный тормозной цилиндр соединяются через коммутационный клапан, открываемый при нулевом электрическом токе, и переключающий клапан высокого давления.
Дополнительный невозвратный клапан с определенным давлением закрытия предотвращает высасывание лишней тормозной жидкости из цилиндров колес. Насосы приводятся в действие электродвигателем постоянного тока в зависимости от потребностей. Двигатель вращает расположенный на его валу эксцентриковый подшипник.На рис. «Модуляция давления в гидравлическом блоке ESP» показаны три примера модуляции давления. Чтобы нагнеталось давление независимо от водителя (рис. с), коммутационные клапаны закрываются, а переключающие клапаны высокого давления — открываются. Теперь самовсасывающий насос подает тормозную жидкость на соответствующее колесо или колёса, нагнетая давление. Впускные клапаны других колес остаются закрытыми.
Чтобы уменьшить давление, выпускные клапаны открываются, а переключающие клапаны высокого давления возвращаются в исходное положение (рис. b). Тормозная жидкость вытекает из рабочих тормозных цилиндров колес в резервуары низкого давления, опорожняемые насосами. Управление двигателем насоса, в зависимости от потребностей, уменьшает шум при нагнетании и регулировании давления.
Для частично активного управления (рис. а) переключающий клапан высокого давления должен быть способен открывать всасывающий канал насоса при высоком дифференциальном давлении (> 0,1 МПа). Первая ступень клапана открывается за счет магнитной силы катушки, находящейся под напряжением, а вторая ступень — за счет разности гидравлических площадей. Если контроллер ESP обнаружит нестабильное состояние автомобиля, то коммутирующие клапаны (открытые при нулевом электрическом токе) закрываются, а переключающий клапан высокого давления (закрытый при нулевом электрическом токе) открывается.
Затем два насоса генерируют дополнительное давление для стабилизации автомобиля. По завершении вмешательства системы открывается выпускной клапан, и тормозная жидкость из рабочего тормозного цилиндра регулируемого колеса выходит в аккумулятор. Как только водитель отпустит педаль тормоза, тормозная жидкость откачивается из аккумулятора обратно в бачок.
Система контроля
Комплексная система контроля безопасности является фундаментальной для обеспечения надежного функционирования ESP. Система контроля безопасности охватывает работу системы ESP вместе с ее компонентами и всеми другими функциональными взаимосвязями. В основе системы контроля безопасности лежат такие методы, как FMEA, FTA и исследования с моделированием неисправностей. Применяются методы по исключению ошибок, которые бы имели последствия, относящиеся к безопасности. Крупномасштабные программы контроля гарантируют надежное и точное определение всех ошибок датчиков, которые не могут быть полностью исключены. Эти программы основаны на хорошо разработанных надежных программных обеспечениях систем ABS и TCS, контролирующих все компоненты, подключенные к ЭБУ вместе с их электрическими подсоединениями. Со временем надежное программное обеспечение улучшалось более полным использованием возможностей, предоставлявшихся дополнительными датчиками и их последующим приспособлением к специальным компонентам и функциям ESP.
Работа датчиков контролируется в несколько этапов. Во время первой стадии датчики непрерывно контролируются во время управления автомобилем на обрыв проводов и вероятность прохождения сигнала (внедиапазонная проверка, определение помех, физическое правдоподобие). В течение второго этапа наиболее важные датчики проверяются отдельно. Датчик скорости вращения вокруг вертикальной оси испытывается путем преднамеренной расстройки чувствительного элемента и затем оценивается на прохождение сигнала. Даже датчик ускорения имеет внутренний фоновый контроль. При активации сигнал датчика давления должен показывать предопределенную характеристику; происходит внутренняя компенсация смещения и усиления. Датчик угла поворота рулевого колеса имеет свои собственные контрольные функции, которые непосредственно сопровождают какое-либо ошибочное сообщение, поступающее к ЭБУ. Дополнительно контролирует цифровой сигнал, постоянно передаваемый к ECU. Во время третьего этапа применяется аналитическая избыточность для контроля работы датчиков во время стационарного режима эксплуатации автомобиля. В данном случае используется модель автомобиля с целью проверить тот факт, что не имеется нарушений для определенных связей между сигналами датчиков и движением автомобиля. Эти модели также часто применяются для вычислений и компенсирования смещений датчиков, поскольку они остаются в пределах технических условий.
В случае возникновения ошибки система выключается или частично, или полностью, что зависит от типа ошибки. Реагирование системы на ошибки также зависит от того, действительно ли осуществлялось управление.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ:
Почему опытные водители отключают ESP зимой — Российская газета
На дорогах стало больше снега и наледи. В этих условиях многие водители полагаются на систему стабилизации, которая призвана выправить автомобиль при опасном уводе с курса. Однако в ряде случаев ESP может также и навредить. Именно поэтому опытные водители отключают помощник, если бортовая электроника допускает такую опцию.
Чтобы яснее понимать плюсы и минусы системы стабилизации (она же ESP, ESC, VDC, VSC, DSC, DSTC) кратко напомним принцип работы этого по большей части полезного помощника. Алгоритм работы отражен в самих названиях. ESP (Electronic Stability Program), ESC (Electronic Stability Control), VDC (Vehicle Drive Control).
Во всех случаях речь идет об электронном контроле устойчивости, когда блок управления, ориентируясь на положение руля и скоростной режим, применяет торможение одного или нескольких колес, чтобы предотвратить резкий увод с курса. Одновременно ЭБУ сокращает подачу топлива для уменьшения крутящего момента на колесах. Таким образом, система стабилизации радеет о перемещении автомобиля в том направлении, куда указывает поворот руля.
Современные системы стабилизации при этом взаимосвязаны с ABS, антипробуксовочной системой и блоком управления двигателем. Между тем, в некоторых моделях или их начальных комплектациях система стабилизации может отсутствовать вовсе. Или, как вариант, может предусматриваться алгоритм частичного или полного отключения такого ассистента.
В любом случае, существуют ситуации, когда система стабилизации мешает опытному водителю. Вот типичный пример. При выходе из скользкого (заснеженного или обледенелого) поворота для компенсации начавшегося заноса водитель увеличивает подачу газа, однако электроника пресекает такие намерения и, образно говоря, душит движок, крадя нужные для маневра запасы тяги.
В продвинутых автомобилях с автоматизированными трансмиссиями одновременно коробка может автоматически переходить в таком случае на пониженную передачу. В результате автомобиль теряет тягу, а тормозные механизмы срабатывают таким образом, чтобы вернуть машину на курс. Получается, что управляет в данной экстренной ситуации уже не человек, а машина.
Еще в одну «свинью» ESP может подложить, когда вы пытаетесь выехать из нерасчищенного от снега двора или забраться на снежный подъем. Здесь электроника опять-таки попытается обрубить тягу, распознав проскальзывание колес. В результате не удается ни выехать из сугроба, ни заехать на горку. Совет при отсутствии ESP или невозможности ее отключить тут может быть только один — избегайте резких нажатий на «газ», чтобы у системы стабилизации не было соблазна «душить» движок.
Но можно ли вовсе исключить такое «самоуправство» системы стабилизации? В подавляющем большинстве случаев вы сможете сделать это не полностью, поскольку в большинстве моделях без спортивного потенциала допускается лишь частичное отключение ESP, когда система будет позволять небольшие заносы и скольжения, но вмешается в ситуацию при больших углах поворота руля и соответственно опасных с точки зрения ЭБУ отклонений от траектории.
В спорткарах же система стабилизации отключается полностью и имеет двухступенчатый алгоритм деактивации. С первым нажатием на клавишу ESP вырубается противобуксовочная система и снимается ограничение на подачу тяги. Если же удерживать кнопку несколько секунд (в разных моделях время может отличаться), то максимально ослабится или вовсе отстегнется электронный «ошейник» — ESP перестанет задействовать тормозные механизмы для корректировки курса. Кроме того, у некоторых моделей систему ESP можно отключить через меню бортового компьютера.
Конечно, существуют и более радикальные варианты отключения системы стабилизации. Например, помощника можно деактивировать программно — такую манипуляцию можно выполнить на сервисе при соответствующей необходимости или при доступе к соответствующему оборудованию. К примеру, при подготовке прошлогодней ездовой презентации Renault Arkana (в программу входил в том числе и дрифт на льду) специалисты компании у всех тестовых автомобилей вырубили ESP путем подключения автомобилей к компьютеру.
И, наконец, не секрет, что любители дрифта умудряются «обездвижить» ESP, деактивируя предохранитель, завязанный на ABS. С той же целью отсоединяют разъем колесного датчика ABS или разъем с центрального блока ABS. В некоторых случаях такая тактика действительно срабатывает, и в комбинации приборов загорается сигнализатор неисправности системы. ESP при этом перестает работать полностью на радость дрифтерам и людям, которые попросту не могут преодолеть сложный скользкий участок, например, добираясь зимой до загородной дачи.
Cистема курсовой устойчивости и динамической стабилизации
Автор admin На чтение 6 мин. Просмотров 308
В своем стремлении сделать автомобили как можно более безопасными, производители оснащают их всевозможными вспомогательными системами, предназначенными для того, чтобы в нужный момент помочь водителю избежать опасности. Одна из них – это система курсовой устойчивости. На автомобилях разных марок она может называться по-разному: ESC у Honda, DSC у BMW, ESP у подавляющего большинства европейских и американских автомобилей, VDC у Subaru, VSC у Toyota, VSA у Honda и Acura, но предназначение у системы курсовой стабилизации одно – не позволить автомобилю сойти с заданной траектории при любых режимах езды, будь то разгон, торможение, движение по прямой или в повороте.
Работа ESC, VDC и любой другой может быть проиллюстрирована следующим образом: машина движется в повороте с набором скорости, внезапно одна сторона попадает на занесенный песком участок. Сила сцепления с дорогой резко меняется, и это может привести к заносу или сносу. Чтобы предотвратить уход с траектории, система динамической стабилизации моментально перераспределяет крутящего момента между ведущими колесами, и при необходимости подтормаживает колеса. А в случае, если автомобиль оснащен активной системой рулевого управления, изменяется угол поворота колес.
Впервые система курсовой устойчивости автомобиля появилась в далеком 1995 году, тогда получив название ESP или Electronic Stability Programme, и с тех пор стала наибольшее распространенной в автомобилестроении. В дальнейшем устройство всех систем будет рассматриваться на ее примере.
- Устройство систем ESC, DSC, ESP, VDC, VSC, VSA
- Принцип работы систем ESC, DSC, ESP, VDC, VSC, VSA
- Насколько необходима система динамической стабилизации
- Дополнительные возможности систем ESC, DSC, ESP, VDC, VSC, VSA
Устройство систем ESC, DSC, ESP, VDC, VSC, VSA
Система курсовой устойчивости представляет собой систему активной безопасности высокого уровня. Она является составной, состоящей из более простых, а именно:
Данная система состоит из набора входных датчиков (давления в тормозной системе, угловой скорости колес, ускорения, скорости поворота и угла поворота руля и других), блока управления и гидравлического блока.
Одна группа датчиков применяется для оценки действий водителя (данные об угле поворота рулевого колеса, давлении в тормозной системе), другая помогает анализировать фактические параметры движения машины (оценивается частота вращения колес, поперечное и продольное ускорение, скорость поворота авто, давление в тормозной).
ЭБУ ESP, основываясь на данных, полученных от датчиков, подает соответствующие команды исполнительным устройствам. Помимо систем, входящих в состав самой ESP, ее блок управления взаимодействует с блоком управления двигателем и блоком управления АКПП. От них он также получает необходимую информацию и посылает им управляющие сигналы.
Система динамической стабилизации работает, посредством гидравлического блока ABS.
Принцип работы систем ESC, DSC, ESP, VDC, VSC, VSA
ЭБУ системы курсовой устойчивости работает непрерывно. Получая информацию от датчиков, анализирующих действия водителя, вычисляет желаемые параметры движения автомобиля. Полученные результаты сравниваются с фактическими параметрами, информация о которых поступает от второй группы датчиков. Несовпадение распознается ESP как неконтролируемая ситуация, и она включается в работу.
Стабилизируется движение следующими способами:
- подтормаживаются определенные колеса;
- изменяется крутящий момент двигателя;
- если автомобиль имеет систему активного рулевого управления, изменяется угол поворота передних колес;
- если машина имеет адаптивную подвеску, изменяется степень демпфирования амортизаторов.
Крутящий момент мотора изменяется одним из нескольких способов:
- изменяется положение дроссельной заслонки;
- пропускается впрыск горючего или импульс зажигания;
- изменяется угол опережения зажигания;
- отменяется переключение передачи в АКПП;
- в случае полного привода осуществляется перераспределение крутящего момента на осях.
Насколько необходима система динамической стабилизации
Существует немало противников каких-либо вспомогательных электронных систем в автомобилях. Все они, как один, утверждают, что ESC, DSC, ESP, VDC, VSC, VSA и прочие только расхолаживают водителей и к тому же являются просто способом вытянуть из покупателя побольше денег. Свои доводы они подкрепляют еще и тем, что еще 20 лет назад, в автомобилях не было подобных электронных помощников, и, тем не менее, водители прекрасно справлялись с управлением.
Надо отдать должное, что доля истины в этих аргументах есть. В самом деле, многие водители, уверовав в то, что помощь ESC, DSC, ESP, VDC, VSC, VSA дает им практически безграничные возможности на дороге, начинают ездить, пренебрегая здравым смыслом. Итог может быть очень печальным.
Тем не менее, согласиться с противниками систем активной безопасности нельзя. Система курсовой устойчивости необходима, хотя бы как страховочная мера. Как показывают исследования, человек затрачивает намного больше времени на оценку ситуации и правильную реакцию, чем электронная система. ESP уже помогла сберечь жизнь и здоровье многим участникам дорожного движения (особенно начинающим водителям). Если же водитель отточил свое мастерство до такой степени, что система, хоть и работает, но не вмешивается в действия человека, его можно только поздравить.
Дополнительные возможности систем ESC, DSC, ESP, VDC, VSC, VSA
Система курсовой устойчивости, помимо своей основной задачи – динамической стабилизации автомобиля, может выполнять и дополнительные задачи, такие как предотвращение опрокидывания машины, предотвращение столкновения, стабилизация автопоезда и другие.
Внедорожники, в силу высоко расположенного центра тяжести, склонны к опрокидыванию при вхождении в поворот на высокой скорости. Для предотвращения такой ситуации предназначена система предотвращения опрокидывания, или Roll Over Prevention (ROP). В целях повышения устойчивости подтормаживаются передние колеса автомобиля, и снижается крутящий момент двигателя.
Для реализации функции предотвращения столкновения системам ESC, DSC, ESP, VDC, VSC, VSA дополнительно требуется адаптивный круиз-контроль. Вначале водителю подаются звуковые и визуальные сигналы, если реакции не последовало – автоматически нагнетается давление в тормозной системе.
Если система курсовой устойчивости выполняет функцию стабилизации автопоезда на автомобилях, оснащенных тягово-сцепным устройством, то она предотвращает рыскание прицепа за счет подтормаживания колес и уменьшения крутящего момента двигателя.
Еще одна полезная функция, которая бывает особенно необходима при езде по серпантину, заключается в повышении эффективности тормозов при нагреве (название Over Boost или Fading Brake Support). Работает она просто – при нагреве тормозных колодок автоматически повышается давление в тормозной системе.
Наконец, система динамической стабилизации может автоматически удалять влагу с тормозных дисков. Активизируется такая функция при включенных стеклоочистителях на скорости свыше 50 км/ч. Принцип действия заключается в кратковременном регулярном повышении давления в тормозной системе, в результате чего колодки прижимаются к тормозным дискам, те нагреваются и попавшая на них вода частично снимается колодками, а частично испаряется.
Что еще стоит почитать
Основы высадки: Стабилизация автомобиля | Пожарная часть
Многие из национальных пожарных и спасательных служб оказывают услуги по технической помощи своим общинам. Одна из сфер, которая очень характерна для многих организаций, — это высадка автомобилей. В то время как газеты и другие средства массовой информации постоянно демонстрируют фотографии действий по освобождению, многие не осознают подготовительную и материально-техническую работу, необходимую для успешной операции по освобождению. Мы рассмотрим некоторые из этих характеристик, обсудим некоторые из наиболее распространенных маневров высадки, а затем продемонстрируем некоторые из более сложных маневров для тех случаев, когда нам нужно действовать в чрезвычайных обстоятельствах.
Когда мы думаем об освобождении, на самом деле мы говорим о распутывании, фактическом удалении транспортного средства от жертвы (см. Фото 1). Удаление или высвобождение пострадавшего происходит после работ по распутыванию транспортного средства. Это будет сильно различаться в зависимости от силы удара и состава обоих материалов, которые были задействованы в аварии.
Итак, что должен предложить местный поставщик услуг? Прежде всего, обученный, квалифицированный персонал является активом номер один на любом месте спасения, и эвакуация ничем не отличается.Обучение будет сосредоточено не только на навыках распутывания; нам понадобятся люди для стабилизации, оказания медицинской помощи пострадавшим и контроля над угрозой возгорания на этих местах. Кроме того, в зависимости от задействованных транспортных средств, может потребоваться ответ от местной группы Haz / Mat. Эти навыки не станут второй натурой без многочасовой практической работы с инструментами и оборудованием, связанными с этими методами (см. Фото 2). Сцена высадки — динамическое событие; он всегда меняется и может быстро испортиться (см. фото 3).Поэтому было бы упущением не подчеркнуть использование полных средств индивидуальной защиты (СИЗ), в том числе вторичной защиты глаз над щитами шлема, оборудования для изоляции телесных веществ (BSI), стрелочного и аварийного снаряжения для пожарных и скорой помощи и т. Д. Любое отсутствие или игнорирование использования этих основных компонентов защитного ансамбля может привести к серьезным травмам, и этому нет допустимого оправдания.
Ваш отдел направлен на место происшествия, о котором сообщается, с захватом транспортного средства.Пришло время начать оценивать ситуацию, а не на месте происшествия. С помощью диспетчерского задания можно собрать много информации. Например, тип дороги (жилая улица, шоссе) может дать представление о ожидаемой скорости столкновения. Местоположение зоны может предоставить информацию о возможных опасностях, например о типе транспортного средства, промышленном оборудовании (с вилочными погрузчиками и строительными машинами тоже случаются аварии) и о проблемах доступа к месту происшествия (см. Фото 4). Одним из основных моментов, которые следует учитывать при увеличении размера, является «золотой час», который представляет собой время, связанное с началом воздействия, до тех пор, пока пациенту не будет оказана окончательная медицинская помощь в утвержденном медицинском учреждении.Проблема в том, что часы Золотого часа начали работать до того, как были отправлены респонденты; можно только оценить количество прошедшего времени, исходя из времени срабатывания сигнализации, времени рефлекса для ответа и проблем с дорожным движением, препятствующих доступу к месту происшествия. Поскольку это трудно установить с какой-либо степенью уверенности, разумно сосредоточить усилия на месте действия на «Платиновой десятке», которая является оптимальным периодом времени, когда прибудут лица, оказывающие помощь, до тех пор, пока пациента не освободят и не вытащат из машины.Сокращение общего времени эвакуации до менее десяти минут поможет приблизить операции к «Золотому часу».
Прочитать обломки
По прибытии первые лица должны быть отправлены к обломкам и провести обследование внутреннего круга инцидента. Это полный круговой обход вокруг инцидента, глядя в сторону обломков, чтобы получить некоторую важную информацию об инциденте. Обратите внимание на такие проблемы, как количество жертв, запертые или заклинившие двери, все еще работающие транспортные средства, утечки жидкости или топлива, задействованные коммунальные услуги (электрические / газовые) и доступ потенциальных жертв.Обязательно найдите время, чтобы «прочитать обломки», чтобы узнать о травмах, связанных с ударами. При чтении обломков учитывается кинетическая энергия (сила энергии движения), которая привела к потенциальным травмам, вызванным передачей энергии через транспортное средство (см. Фото 5). Внезапная остановка в результате аварии преобразует эту энергию в повреждение транспортных средств. Эти силы также передаются через пассажиров и могут усугубляться транспортными средствами, движущимися в противоположных направлениях (лобовой удар).Учитывайте величину удара на месте происшествия: сначала транспортное средство сталкивается с объектом, а затем жертва сталкивается с транспортным средством. Наконец, внутренние органы жертвы сталкиваются друг с другом. Последнее столкновение может нанести наибольший урон жертве. Идентификация этих сигнатур ударов поможет определить потенциальные механизмы травм, с которыми экипажи могут столкнуться у пострадавших на месте происшествия.
Например, лобовое столкновение приводит к большему количеству смертельных случаев, чем любое другое столкновение.Во время лобового столкновения оба автомобиля движутся примерно с одинаковой скоростью, что означает, что они обладают одинаковой кинетической энергией. В момент столкновения их энергия складывается. Итак, если бы оба автомобиля двигались со скоростью 35 миль в час, их сила удара была бы аналогична удару о неподвижный объект со скоростью 70 миль в час. Удары сзади могут привести к травмам и нагрузкам на шею, спину и позвоночник. Боковые столкновения могут привести к серьезным травмам головы и шеи, учитывая, что это небольшие пространства с тонкими зонами деформации и, в лучшем случае, ограниченной защитой.Переворачивание приводит к гибели многих людей из-за катапультирования, когда необузданные жертвы выбрасываются через отверстия в битом стекле.
Типы конструкций
Кроме того, определение типа транспортного средства, участвующего в эвакуации, поможет определить типы методов, которые будут использоваться во время операций, на основе сильных сторон транспортных средств для стабилизации и расцепления. Транспортные средства будут различаться по размеру, мощности, оснащению, функциям безопасности и конструктивным технологиям.Три из этих типов конструкции включают автомобили Full Frame, Unibody и Space Frame.
Полнокадровые автомобили имеют рельсы рамы, которые проходят от передней части автомобиля, под пассажирским салоном, к задней части автомобиля. Эти направляющие обеспечивают монтажную опору для пассажирских салонов, силовых агрегатов и других компонентов автомобиля.
Транспортные средства Unibody имеют короткие рельсы рамы, которые заканчиваются под автомобилем, в передней части салона или в зоне противопожарной защиты.В конструкции этого типа используется пассажирский салон для обеспечения целостности и устойчивости.
Space Frame использует стальную каркасную конструкцию, которая выдерживает нагрузки и напряжения транспортного средства и удерживает его вместе.
Эти типы конструкции будут использоваться во всех типах транспортных средств, начиная от малолитражек, компактных, полноразмерных, внедорожников, лимузинов, пикапов и минивэнов. Лучший способ определить место происшествия — это заглянуть под автомобиль, чтобы проверить наличие направляющих рамы и увидеть, где они заканчиваются.Если нет полноразмерных рамных реек, то рассчитывайте на конструкцию Unibody или Space Frame.
Новые автомобильные технологии добились значительных успехов за последнее десятилетие, но некоторые из них привели к возникновению проблемных ситуаций на месте спасения:
- Усиленные системы отклонения колес и двигателя позволяют колесам и компонентам двигателя отклоняться под автомобилем и от пассажиров.
- Зоны смятия в моторном отсеке были разработаны для поглощения большего количества энергии.
- Ударные стержни, изготовленные из бора или микролегированной стали, могут усугубить проблемы, когда бригады пытаются снять или открыть дверь автомобиля.
- Подушки безопасности и преднатяжители ремней безопасности теперь можно найти практически в любом месте внутри автомобиля (см. Фото 6 и 7). Эти механизмы стали причиной многих травм спасателей.
- Новая технология стекла предназначена для удержания необузданного пассажира внутри автомобиля во время удара; это также может значительно затруднить доступ спасателей.
- Батареи теперь расположены где угодно по всему автомобилю, создавая проблемы с подачей энергии для большей части обломков.
- Передний и задний бамперы могут «нагружаться» после удара, в результате чего бампер в сборе становится снарядом во время высвобождения.
- Различные виды топлива, в том числе автомобили с гибридным приводом, могут добавить к работе проблемы высокого напряжения и взрыва.
Ключом к успеху этих усовершенствований является их выявление на ранней стадии эксплуатации, чтобы можно было принять адекватные меры предосторожности. Известно множество историй, когда спасатели получали травмы и получали серьезные травмы из-за использования некоторых из этих «предохранительных» устройств.
Пока выполняется исследование внутреннего круга, другая команда спасателей также должна проводить исследование внешнего круга. Обследование внешнего круга — это полный обход всего места происшествия лицом наружу (от места происшествия). Эти спасатели ищут дополнительные проблемы, связанные с инцидентом, такие как поврежденные здания, которые нуждаются в структурной опоре, жертвы, выброшенные из места происшествия, жертвы, пострадавшие от происшествия, ходьба раненых жертв, автомобили, попавшие в аварию, которые остановились вдали инцидент и ущерб полезности вдали от инцидента.Эти ситуации не могут быть идентифицированы прибывающими экипажами из-за туннельного зрения и сосредоточения внимания на очевидных жертвах; не попадитесь в эту ловушку, обязательно проведите тщательное обследование, прибыв на место ДТП.
Стабилизация
Теперь, когда мы определили некоторые важные моменты реакции и увеличения размера на месте происшествия, необходимо стабилизировать транспортное средство. Стабилизация — это применение оборудования и методов, предназначенных для предотвращения движения транспортного средства в любом направлении.Мы достигаем этого, сосредоточив наши усилия по стабилизации на трех различных категориях.
Горизонтальная стабилизация включает в себя остановку движения транспортного средства спереди назад, что может включать в себя забивание шин, спуск шин, постановку транспортного средства на стоянку и установку стояночного тормоза.
Вертикальная стабилизация останавливает движение транспортных средств вверх и вниз за счет использования ступенчатых упоров, опор коробки и спасательных распорок.
Box Cribbing — это процесс стабилизации, который выбирают многие спасательные команды.В этом методе используются деревянные или пластиковые материалы для кроватки (обычно размерная древесина, 4 «x 4» или 6 «x 6»), которые укладываются перпендикулярно, чтобы выдержать вес транспортных средств (см. Фото 8).
Прочность пластмассового композитного материала для опор определяет производитель, в то время как практическое правило для деревянных опор составляет 500 фунтов на квадратный дюйм площади поверхности контакта. Например, если спасательная бригада использует опоры размером 4 x 4 дюйма, уложенные по два на ярус, мы можем определить прочность кроватки, измерив площадь контакта с поверхностью.Древесина 4 «x 4» фактически равна 3,5 «x 3,5», что при умножении равно 12,25 «. В двухъярусной коробчатой кроватке есть четыре точки соприкосновения, что в умножении на площадь поверхности дает 49 дюймов (12,25 x 4 = 49 дюймов). Умножьте общую площадь поверхности на 500; прочность этой конкретной коробчатой кроватки равна 24 500 фунтов прочности на каждую коробчатую кроватку. Если бригада развернет четыре точки стабилизации с помощью коробчатой опоры, то вес, который может поддерживаться, может быть значительным.
Наряду с материалами для опор существует множество производителей комплектов для стабилизации транспортных средств, которые можно использовать для стабилизации транспортных средств.Эти комплекты включают спасательные распорки с набором различных оснований и адаптеров для адаптации к состоянию обломков. Эти комплекты служат отличным выбором для автомобилей, которые заводятся на бок и на крышу. При выборе набора для использования в вашей зоне реагирования важно изучить множество различных вариантов, которые предлагаются в некоторых из этих наборов, а затем решить, какой из них лучше всего подходит для вашего отдела.
Стабилизация салона — последняя категория стабилизации.Это включает в себя парковку автомобиля, выключение зажигания, извлечение ключа из автомобиля, опускание всех окон, открытие грузовика и капота, если применимо, медленное перемещение сидений с электроприводом назад, если это возможно, снятие настроек наклона колес, и перемещение электрических педалей в сторону для работы. Для этого потребуется спасатель, чтобы сесть в автомобиль и связаться с пациентом; поэтому обязательно обеспечьте как горизонтальную, так и вертикальную стабилизацию, прежде чем отправлять спасателя в автомобиль по любой причине.
Заключение
Как видите, существует множество шагов и соображений, которые необходимо принять во внимание, прежде чем спасатель сможет начать вытеснять любой металл из транспортного средства. Жизненно важно, чтобы бригады действовали быстро и эффективно для выполнения этих начальных действий, чтобы фактическое распутывание и высвобождение могло произойти в пределах временных рамок «Платиновой десятки». В следующем месяце мы рассмотрим получение доступа к транспортному средству, точки покупки и некоторые базовые методы перемещения компонентов.
До следующего раза, оставайся сосредоточенным и оставайся в безопасности.
МАЙКЛ П. ДЕЙЛИ — лейтенант и офицер по обучению в городке Монро, штат Нью-Джерси, пожарный округ № 3, и инструктор пожарной академии округа Мидлсекс, где он отвечает за разработку учебных программ по обучению спасателей. Майк имеет обширный опыт работы в пожарных службах и имеет степень в области управления бизнесом и общественной безопасности. Майк служит офицером службы спасения в Городской поисково-спасательной оперативной группе Нью-Джерси 1 и является управляющим членом Fire Service Performance Concepts, группы консультантов, которая оказывает помощь и поддержку пожарным службам в их программах обучения и разработке курсов.Майк был гостем нескольких подкастов Firehouse.com, включая подкасты «Успешные спасательные операции в сегодняшней пожарной службе», «Подготовка к завтрашнему развертыванию RIT сегодня» и «Круглый стол по тактике пожара в подвале». Посмотреть все статьи и подкасты Майкла можно здесь. Вы можете связаться с Майклом по электронной почте: [email protected].
Контроль тяги и системы контроля устойчивости: в чем разница?
Разница между контролем тяги и контролем устойчивости подобна разнице между GED и степенью магистра или доктора философии в области безопасности транспортных средств.Контроль устойчивости — это просто противобуксовочная система с дополнительным обучением (компьютерное программирование) и лучшими инструментами (более мощный процессор и больше электронных датчиков).
Ясно, что антиблокировочная тормозная система, или ABS, как мы ее теперь знаем, была первой — на Imperial 1971 года. В том же году Buick Riviera представила MaxTrac, примитивную систему контроля тяги без вмешательства тормозов, которая вместо этого сравнивала выходную скорость трансмиссии со скоростью передних колес для обнаружения пробуксовки и отсечения искры двигателя до тех пор, пока скорости передних и задних колес не сравнялись.Сообщается, что из-за отсутствия возможности уменьшить количество топлива, протекающего через карбюратор, это привело к впечатляющим обратным результатам.
Система контроля устойчивости дебютировала в 1990 году на японском рынке Mitsubishi Diamante, которую по-разному называли системой активного контроля трассировки и тяги, затем Active Skid and Traction Control (ASTC), но впервые в Америке появилась система, подобная тем, которые мы знаем сегодня. с помощью Bosch на купе Mercedes-Benz S600 1995 года. Давайте рассмотрим и сравним существующие сегодня системы.
Что такое трекшн-контроль?
Просмотреть все 4 фотографииЭта функция активной безопасности была разработана, чтобы позволить транспортным средствам оптимально использовать ускоряющую тягу, имеющуюся на любой заданной поверхности, путем измерения пробуксовки колес и последующего управления ею с помощью гидравлических соленоидов антиблокировочной тормозной системы. тормозное давление и / или использование электронного управления дроссельной заслонкой, топливом или искрой двигателя для уменьшения мощности и замедления вращающегося колеса.Эти системы часто предлагают возможность отключения. Кнопка для этого может быть помечена TC, TCL или значком, изображающим заднюю часть автомобиля над двумя знаками выгорания в форме буквы S. Если ваш автомобиль оборудован системой контроля тяги и устойчивости, они почти наверняка будут управляться одной и той же кнопкой, которая затем может быть помечена как ESC, VSC или со значком. Чтобы увидеть полный список сокращений, используемых для контроля тяги и устойчивости, прокрутите эту статью до конца.
Что такое система контроля устойчивости?
В современных системах контроля устойчивости используется все оборудование, необходимое для противобуксовочной системы и антиблокировочной системы тормозов (датчик нажатия педали тормоза и датчики скорости вращения колес на каждом колесе, а также корпус гидравлического клапана, способный сбрасывать или увеличивать давление в тормозной системе). тормозной контур для каждого колеса независимо) и добавляет несколько новых датчиков.Датчик положения рулевого колеса соединяется с датчиками педали тормоза и акселератора, чтобы сообщить системе предполагаемый путь и скорость водителя. Датчик рыскания измеряет, насколько автомобиль вращается вокруг своей вертикальной оси (то, что вы ощущаете как занос или вращение), а модуль трехосевого акселерометра определяет как поперечное, так и продольное ускорение, а также любой угловой уклон, по которому движется транспортное средство. . Обращаясь ко всем этим датчикам, более мощный компьютер затем сравнивает фактическое движение автомобиля с намерением водителя.Если они не совпадают, система применяет отдельные колесные тормоза (а также органы управления двигателем, если необходимо), чтобы привести путь транспортного средства в соответствие с намерениями водителя. Обратите внимание: поскольку контроль устойчивости стал обязательным в США в 2012 году, все новые легковые автомобили оснащены святой троицей систем помощи водителю: ABS, системой контроля тяги и контроля устойчивости.
Как система стабилизации изменяет траекторию движения автомобиля?
Если вы когда-либо занимались греблей на каноэ, каяках или рафтингом, вы, вероятно, управляли лодкой, гребя спиной по той стороне, в которую вы хотите направиться.Система контроля устойчивости делает то же самое — добавляет тормозное давление к одной стороне автомобиля, чтобы мягко поворачивать его в этом направлении, с разными результатами в зависимости от того, задействованы ли передние или задние тормоза и насколько сильно они задействованы. Помните, что водитель уже набрал желаемое количество рулевого управления, поэтому, если автомобиль не реагирует должным образом, то снижение тяги, сильный ветер или какая-то другая внешняя сила вызывает отклонение пути, поэтому просто заказывайте электрический помощь в рулевом управлении для большего поворота вряд ли даст желаемый эффект.Система контроля устойчивости делает свою работу незаметно для водителя, за исключением, возможно, мигания лампы контроля устойчивости, которая указывает на то, что система работает.
Просмотреть все 4 фотографииКак работают вместе ABS, антипробуксовочная система и система курсовой устойчивости?
Системы полностью интегрированы, поэтому невозможно обеспечить контроль устойчивости или антипробуксовочную систему без АБС. Блок гидравлических клапанов антиблокировочной тормозной системы позволяет регулировать скорость вращения колес, необходимую для ограничения пробуксовки колес для контроля тяги и для контроля устойчивости, чтобы регулировать траекторию движения автомобиля.Некоторые автомобили позволяют водителям отключать или снижать эффективность систем. Кнопки отключения трекшн-контроля являются наиболее распространенными, кнопки отключения стабилизации менее распространены (и когда они существуют, они могут быть вложены в экранные меню, и они редко полностью выключают систему, как мы часто обнаруживаем в нашем тестировании на восьмерке). Как уже отмечалось, в этих системах также используется одна и та же кнопка. Обратите внимание, что начиная с B3 (’86 -’92) Audi 80/90 не предлагала выключатель ABS.
Моя система контроля устойчивости предлагает настройки — какие из них лучше?
Некоторые высокопроизводительные автомобили предлагают различные настройки (например, Chevrolet Corvette, многие автомобили Cadillac V-образные или любой автомобиль BMW M), адаптированные к более агрессивным дорожным ситуациям.Иногда они предлагают так много настроек, что форумы владельцев, вероятно, лучше подготовлены для ответа на этот вопрос. Транспортные средства, ориентированные на бездорожье, которые обеспечивают различные режимы местности, адаптируют уровень вмешательства в систему контроля устойчивости в каждом для соответствия различным ландшафтам, поэтому лучше всего просто настроить этот режим в соответствии с местностью, которую вы покрываете. В противном случае, John & Jane Q Public лучше всего не трогать эти кнопки контроля тяги и устойчивости на дорогах общего пользования. Настройки режима производительности часто доступны только из глубины дерева меню информационно-развлекательной системы или путем нажатия и удерживания кнопки в течение многих секунд.Они, как правило, делают систему более допускающей нейтральное скольжение или даже некоторую избыточную поворачиваемость. Если у вас были высокопроизводительные курсы обучения водителей, и вы планируете водить машину по закрытому маршруту с ограждениями и т. действительно сделать вашу машину намного более увлекательной для вождения. Обратите внимание, что многие (но не все) из этих систем возвращаются в режим полной защиты, если вы касаетесь тормозов или нажимаете на них в середине слайда.
Когда следует выключать антипробуксовочную систему?
Если вы находитесь в обычном автомобиле без режимов рельефа, который слегка застревает в песке или снегу из-за того, что ваша система отключает мощность при первом намеке на пробуксовку колеса, отключение части системы контроля тяги может позволить достаточно крутить, чтобы «сгореть» сквозь снег или песок до более цепкой поверхности внизу, и автомобиль снова двинется.
Когда следует выключать систему контроля устойчивости?
Вы выиграли титул SCCA или закончили гонку LeMans? Помогаете ли вы Ким Рейнольдс измерить производительность MotorTrend Figure Eight на нашем испытательном стенде? Если вы ответили «нет» на все это, то, возможно, никогда, поэтому производители обычно затрудняют доступ к режиму «выключено», чтобы никто случайно не отключил его.Мы не можем порекомендовать когда-либо полностью отключать контроль устойчивости на дороге общего пользования, но исключительные водители, стремящиеся полностью изучить возможности своего высокопроизводительного автомобиля на закрытой дороге или трассе, могут найти настройку «выключения» ценной.
Из-за чего загорается лампа контроля устойчивости?
Просмотреть все 4 фотографииКонтроль устойчивости — это система безопасности, поэтому ее работоспособность постоянно контролируется бортовой диагностической электроникой. Этот свет появляется, когда система либо выключена, либо переключена на более низкий уровень чувствительности, либо имеет какой-либо вид неисправности (некоторые режимы бездорожья снижают эффективность системы настолько, что в этих режимах загорается лампа).Итак, если вы не коснулись переключателя, а он загорелся, у вас, вероятно, неисправность системы. Наиболее распространенными из них являются неисправности датчиков, и первыми должны выйти из строя датчики, установленные в элементах, такие как датчики скорости вращения колес. Они могут выйти из строя, повредиться в результате дорожно-транспортных происшествий или подвергнуться коррозии. Индикатор часто мигает, когда система контроля тяги и / или устойчивости активно вмешивается, чтобы вернуть автомобиль под контроль.
Какие еще названия для контроля устойчивости?
Вот список названий, которые различные производители используют для своих систем контроля устойчивости по всему миру:
Acura: Vehicle Stability Assist (VSA) (ранее CSL 4-Drive TCS)
Alfa Romeo: Vehicle Dynamic Control (VDC)
Audi: электронная программа стабилизации (ESP)
Bentley: электронная система стабилизации (ESP)
BMW: партнер по совместному проектированию и изобретатель с Robert Bosch GmbH и Continental (TEVES) Система динамического контроля устойчивости (DSC) (включая систему динамического контроля тяги)
Bugatti : Электронная система стабилизации (ESP)
Buick: StabiliTrak
Cadillac: StabiliTrak и StabiliTrak3.0 с активным передним рулевым управлением (AFS)
Chevrolet: StabiliTrak и активное управление (только Corvette и Camaro)
Chrysler: электронная программа стабилизации (ESP)
Dodge: электронная программа стабилизации (ESP)
Fiat: электронный контроль устойчивости (ESC) и автомобиль Динамическое управление (VDC)
Ferrari: Controllo Stabilità (CST)
Ford: AdvanceTrac с системой контроля устойчивости при крене (RSC), интерактивной динамикой автомобиля (IVD) и электронной программой стабилизации (ESP)
General Motors: StabiliTrak
Honda: Система стабилизации автомобиля ( VSA) (ранее CSL 4-Drive TCS)
Hyundai: Электронная система стабилизации (ESP), Электронный контроль устойчивости (ESC) и Система стабилизации автомобиля (VSA)
Infiniti: Система динамического контроля автомобиля (VDC)
Jaguar: Система динамической стабилизации (DSC) ) и автоматический контроль устойчивости (ASC)
Jeep: электронная программа стабилизации (ESP)
Kia: электронная система контроля устойчивости (ESC) и электронная программа устойчивости (ESP)
Lamborghini: электронная система стабилизации am (ESP)
Land Rover: система динамической стабилизации (DSC)
Lexus: интегрированная система управления динамикой автомобиля (VDIM) с системой стабилизации автомобиля (VSC)
Lincoln: AdvanceTrac
Maserati: программа стабилизации Maserati (MSP)
Mazda: система динамической стабилизации (DSC) (включая систему динамического контроля тяги)
Соавтор Mercedes-Benz и Robert Bosch GmbH: электронная система стабилизации (ESP)
Mini: система динамического контроля устойчивости
Mitsubishi: мультирежимная система активного противоскольжения и противобуксовочная система и активная система контроля устойчивости (ASC)
Nissan: система динамического контроля автомобиля (VDC)
Porsche: система стабилизации Porsche (PSM)
Subaru: система контроля динамики автомобиля (VDC)
Toyota: система контроля устойчивости автомобиля (VSC) и интегрированное управление динамикой автомобиля (VDIM)
Tesla: система электронного контроля устойчивости ( ESC)
Volvo: Система динамической стабилизации и контроля тяги (DSTC)
Volkswagen: Электронная система стабилизации (ESP)
Безопасная, эффективная и действенная стабилизация на сегодняшний день » s MVC
Роберт Авсек для FireRescue1 BrandFocus
Диспетчерская: «Станция 6, грузовик 2, скорая помощь 402, ответьте в район 5100 квартала Гарфилд-роуд на обнаруженный автомобиль MVC, возможно, находящийся вне дороги.Тайм-аут 21:45 ».
Когда вы и ваша команда на грузовике выезжаете со станции, вы пытаетесь представить себе, как выглядит этот MVC и какие высадки потребуются вам и вашим людям, если таковые имеются. И хотя это много всего происходит в вашей голове, одна вещь, о которой вы не беспокоитесь, — это способность вашей команды стабилизировать транспортное средство, независимо от его ориентации, потому что ваша пожарная служба инвестировала в систему стабилизации ZStrut от JYD Industries.
Система стабилизации ZStrut обеспечивает более безопасную стабилизацию автомобиля. (JYD Industries)«Пожарные доверяют нашим стойкам, потому что, услышав, как мы им говорим, что наши стойки просты в использовании и чрезвычайно эффективны для стабилизации транспортного средства, они выходят, используют их и выясняют, что это правда», — сказала Лаура Миллер, директор по маркетингу и продажи в ESI Equipment, Inc., материнская компания JYD Industries. «Будь то тренировка или реальный звонок, они сами видят, что наши стойки такие, какими мы их называем, и делают то, что мы говорим, они могут».
ОСНОВЫ СТАБИЛИЗАЦИИ АВТОМОБИЛЯВы знаете, что стабилизация транспортного средства заключается в остановке или предотвращении нежелательного движения транспортного средства, когда вы и ваши люди начинаете работать, чтобы получить доступ к пациенту, лечить его и вывести из места аварии.Хороший пример проблемы, которую вы хотите решить, представлен на Рисунке 1 ниже.
Рис. 1. Пирамида с узким основанием менее устойчива, чем пирамида с широким основанием. (Роберт Авсек)Раньше было легче выполнить стабилизацию транспортного средства, когда в результате MVC транспортное средство не заводилось на колеса.По большей части поверхности старых автомобилей были плоскими и стальными. Пожарные могут зажать пару деревянных клиньев или опорных блоков и получить достаточную площадь поверхности земли, чтобы автомобиль оставался устойчивым во время операций по эвакуации.
Но новые легковые автомобили — другое животное. Инженеры-конструкторы автомобилей в своем стремлении к более легким и аэродинамическим автомобилям (для улучшения показателей расхода топлива) начали создавать автомобили с более округлыми и аэродинамическими формами кузова.Кроме того, успехи в технологиях производства стали, углеродных волокон и пластмасс, используемых для производства этих конструкций, привели к созданию транспортного средства, которое действует как пружина, когда оно катится или отскакивает (рис. 2).
Рис. 2. Поскольку современные легковые автомобили действуют больше как пляжные мячи, чем кирпичи, когда они переворачиваются, когда они приземляются на бок или крышу, они имеют очень узкий след, что делает их более нестабильными.(Роберт Авсек)ЛУЧШИЙ СПОСОБ СТАБИЛИЗАЦИИ СОВРЕМЕННОГО ПАССАЖИРСКОГО АВТОМОБИЛЯ
Лучший способ стабилизировать автомобиль с «пляжным мячом» — это натянутые контрфорсы. Контрфорс — это просто колонна (в данном случае распорка), перевернутая так, что ее верхняя часть прикреплена к автомобилю. Затем используется натяжное устройство (ремень с храповым механизмом), чтобы тянуть основание стойки к автомобилю, тем самым прилагая к автомобилю равномерное усилие как в боковом, так и в восходящем направлении (см. Рисунок 3 ниже).
Рис. 3. Использование подкосов в качестве натянутых контрфорсов приводит к увеличению «следа» транспортного средства, что снижает вероятность опрокидывания транспортного средства во время эвакуации, обеспечивая безопасность как пациентов, так и спасателей. (Роберт Авсек)Обладая более чем 15-летним опытом работы фельдшером до основания JYD Industries, Джон Эванс, владелец и президент JYD, видел свою долю «сложных проблем», когда дело касалось эвакуации автомобилей.«Мы часто слышим, как многие говорят о стабилизации автомобиля, — сказал Эванс, — но цель должна заключаться в создании более безопасных условий для работы пожарных и медперсонала для лечения пациентов. Потому что чем раньше будет достигнута стабилизация, тем быстрее вы сможете доставить этого пациента в учреждение окончательного ухода ».
ZSTRUT Спасательные распоркиЛучшая стабилизация транспортного средства, ведущая к более безопасной эксплуатации, — вот что такое ZStrut — и все семейство стоек от JYD Industries.
ZStrut Rescue Struts — это флагманская система стоек JYD, и это в немалой степени связано с их запатентованной технологией ZipNut, уникальным методом развертывания, который полностью исключает необходимость в шпильках.
В сцене MVC пожарный просто подтягивает ZStrut для достижения необходимой длины, поворачивает хомут стойки, чтобы точно настроить регулировку, затем подтягивает хомут, чтобы втянуть его — штифты не требуются!
С ZStrut Rescue Struts меньшее количество пожарных может более безопасно, эффективно и рационально развернуть необходимые распорки, а это означает, что ваши оставшиеся пожарные доступны для участия в других критических задачах по эвакуации автомобилей (например.g., управление опасностями, развертывание и эксплуатация спасательных средств, оказание помощи пациентам).
Пожарные могут развернуть ZStrut с уверенностью, зная, что стойки имеют безопасный предел рабочей нагрузки до 5000 фунтов. с коэффициентом безопасности 2: 1 (результаты тестирования, проведенного независимой третьей стороной).
«Что больше всего нравится пожарным в ZStrut? Они им доверяют, — сказал Миллер.
ЧТО ВЫ ПОЛУЧАЕТЕ С ZSTRUT RESCUE STRUTДля начала, ваша пожарная часть получает полностью автономную систему стоек, которая дает вашим пожарным систему стабилизации транспортного средства, которую проще развернуть для более безопасной, более эффективной и более эффективной стабилизации транспортного средства с меньшим количеством персонала. И чем раньше стабилизируется транспортное средство, тем лучше для ваших пожарных и пациентов, которых они хотят удалить из транспортного средства.
См. ZSTRUT в действии
С технической точки зрения основание ZStrut с полимерным покрытием обеспечивает лучший захват, в то время как основание и скоба работают отдельно, поэтому основание будет оставаться ровным на земле. Большая скоба позволяет пожарному более легко пропустить головку ремня с храповым механизмом для триангуляции одного ремня, в то время как стержень с резьбой из нержавеющей стали 304 дает пожарному возможность выполнять бесконечное количество регулировок для решения любой задачи стабилизации транспортного средства.
Наконец, запатентованная технология ZipNut ZStrut дает пожарному больше возможностей для выполнения этих более тонких регулировок для поддержания стабилизации транспортного средства, которая выполняется вместе с другими задачами по высадке транспортного средства (например, подъемом подушек безопасности).
И все компоненты ZStrut помещаются в специально разработанную сумку для принадлежностей, которая прикрепляется непосредственно к стойке, гарантируя, что у пожарного есть все необходимое для развертывания стойки без необходимости возвращаться к пожарному устройству (а после развертывания сумка для аксессуаров функционирует как хранилище для излишков храпового ремня, чтобы исключить опасность споткнуться или запутаться).
Убедитесь сами, почему ZStrut Rescue Strut от JYD Industries — это спасательная стойка, которая нужна вашей пожарной службе, чтобы лучше удовлетворить свои потребности в стабилизации транспортного средства на MVC.
Как это работает: Контроль устойчивости
Дрифт на автомобиле боком — отличное развлечение для опытного гонщика на закрытой трассе, но это определенно не то, чем водители хотят заниматься в пробках в повседневных поездках.Чтобы помочь вам оставаться на верном пути, Transport Canada требует, чтобы каждое новое пассажирское транспортное средство, продаваемое в Канаде, начиная с 2012 модельного года, было оснащено электронной системой контроля устойчивости (ESC).
Система реагирует за миллисекунды, когда определяет, что автомобиль движется не в том же направлении, что и рулевое управление — другими словами, занос — и немедленно принимает меры, чтобы все исправить. Считается достаточно важным то, что эта функция безопасности теперь также требуется на новых тракторных прицепах, продаваемых в Канаде, а в июне будущего года — также на междугородних и школьных автобусах.
Хотя все системы ESC в основном работают одинаково, между ними могут быть незначительные различия, поэтому автопроизводители часто присваивают им собственные имена. Вы можете увидеть, как это рекламируется под такими терминами, как система стабилизации автомобиля (Acura), AdvanceTrac (Ford), StabiliTrak (General Motors) или Vehicle Dynamic Control (Nissan), среди многих других.
На наших зимних дорогах система стабилизации очень помогает, но не на столько. Майкл Пик / Торонто СанСистема контроля устойчивости использует компоненты и датчики некоторых других функций безопасности автомобиля, включая антиблокировочную систему тормозов (ABS).Тормоза не дают колесам поворачиваться, но на самом деле именно шины, цепляющиеся за асфальт, останавливают автомобиль, и даже хорошие шины способны на многое. В транспортном средстве без АБС заклинивание тормозов приводит к блокировке колес, и шины могут скользить и превращать транспортное средство в гигантский тобогган.
До появления ABS водителей учили включать и выключать тормоза, давая шинам возможность цепляться за тротуар каждый раз, когда тормоза отпускаются. Антиблокировочные тормоза делают то же самое, но они нажимаются и отпускаются электроникой намного быстрее, чем это может сделать любой водитель, помогая сохранить устойчивость автомобиля при остановке.При панической остановке в автомобиле с АБС вы сильно нажимаете на тормоз и не отпускаете ногу, позволяя системе делать свое дело. Когда срабатывает АБС, вы почувствуете пульсацию педали тормоза, а также услышите скрежет или стон. Поскольку теперь шины имеют сцепление, а не скользят, вы также можете управлять автомобилем, если это помогает избежать столкновения, что невозможно, если колеса заблокированы и скользят.
Электронный контроль устойчивости также работает с антипробуксовочной системой автомобиля.Эта электронная система измеряет скорость вращения колес. Если кто-то вращается быстрее, что может указывать на то, что он на скользкой поверхности, система контроля тяги активирует тормоз на этом колесе, а также может на мгновение снизить мощность двигателя, помогая вращающейся шине восстановить сцепление с дорогой. (Иногда вам нужно немного покрутить колеса, например, когда вы пытаетесь выбраться из глубокого снега, поэтому рекомендуется выключить антипробуксовочную систему, если вы застряли.)
И ABS, и антипробуксовочная система. в первую очередь предназначены для продвижения вперед.Если что-то начинает уходить в сторону, тогда на помощь приходит ESC. Это зависит в первую очередь от трех датчиков, которые измеряют рыскание, скорость колес и угол поворота.
Датчик рыскания расположен в центре транспортного средства и, как следует из названия, измеряет рыскание — насколько транспортное средство перемещается влево или вправо от своей вертикальной оси. Затем система сравнивает это с углом поворота — направлением передних колес и тем, как далеко вы их повернули. Если вы повернули колеса влево, а машина послушно поворачивает в ту сторону, то все хорошо.
Но если датчики обнаруживают, что ваши колеса повернуты влево, а машина движется вправо, они понимают, что вы заносите боком. Чтобы помочь вам выйти из этого, он использует некоторые или все компоненты из систем ABS и контроля тяги, включая торможение определенных колес и снижение мощности двигателя, чтобы вернуть все в соответствие с направлением колес и вернуть водителя. в управлении автомобилем. Он работает, когда передние или задние колеса теряют сцепление с дорогой и автомобиль начинает заносить.Он постоянно контролирует автомобиль в любых погодных условиях и автоматически включается при необходимости. Его можно временно отключить на некоторых моделях, но он вернется к значению по умолчанию при следующем запуске двигателя.
Система очень эффективна, и исследования Министерства транспорта Канады показывают, что количество ДТП, вызванных потерей управления водителями из-за этого, снизится на 29 процентов. Но он может сделать очень многое, и пока можно только спорить с законами физики. Чтобы обеспечить безопасное вождение, убедитесь, что ваши шины в хорошем состоянии, с достаточным протектором и должным образом накачаны.Меняйте полосу движения постепенно, вместо того, чтобы поворачивать колесо, чтобы переехать. Разгоняйте автомобиль медленно и равномерно, а не резко нажимайте на педаль газа, особенно на скользкой дороге. А если вы попадете на гравий или мягкую поверхность, например, на обочину, не нажимайте на тормоза. Вместо этого медленно отпустите дроссельную заслонку и постепенно возвращайтесь на тротуар.
Исследование динамических характеристик стабилизации подвеса антенны …: Ingenta Connect
Настоящая тактическая среда — это среда, в которой сеть подключена и работает.Чтобы терминалы спутниковой связи, оснащенные мобильными устройствами, могли обмениваться данными со спутниками с высоким качеством и высокой пропускной способностью, важно, чтобы технология стабилизации используется преодоление внешнего возмущения. В предыдущем исследовании было представлено уравнение движения подвеса терминала спутниковой связи. В различных исследованиях совершенствование управления скоростью и положением с учетом применения инерции, трения, момента дисбаланса и т. Д. для улучшения характеристик управления стабилизацией глаза с помощью различных датчиков обратной связи и ПИ-регулирования.В частности, необходимо учитывать динамику системы и полосу пропускания управления, чтобы обеспечить технологию стабилизации в соответствии с требованиями снижения веса в суровые военные условия, а также для обеспечения технологии стабилизации с учетом влияния применяемых датчиков и нарушения окружающей среды. В этом исследовании мы анализируем влияние динамических характеристик оптимизированной формы подвеса антенны и полосы пропускания управления, и анализируем влияние реальных внешних помех при подключении к гусеничной машине.
Нет доступной справочной информации — войдите в систему для доступа.
Информация о цитировании недоступна — войдите в систему, чтобы получить доступ.
Нет дополнительных данных.
Нет статьи СМИ
Без показателей
Тип документа: Исследовательская статья
Филиалы: LIGNex1 Co., Ltd.
Дата публикации: 12 октября 2020 г.
Подробнее об этой публикации?Материалы конгрессов и конференций INTER-NOISE и NOISE-CON представляют собой сборник представленных докладов.Статьи не рецензируются и обычно представляют собой краткое изложение материалов, представленных на конгрессе или конференции.
- Информация о членстве
- Предметная классификация INCE
- Ingenta Connect не несет ответственности за содержание или доступность внешних веб-сайтов.
Фазовый портретный подход к стабилизации транспортного средства и управлению огибающей
Аннотация
ДТП с потерей управления, которые приводят к тысячам смертей каждый год только в Америке, часто вызваны ошибочными действиями водителя или внезапным изменением дорожного покрытия.В последние годы появилось несколько технологий, направленных на снижение аварийности, одна из которых — электронный контроль устойчивости. Хотя система ESC эффективна для стабилизации автомобиля, она функционирует без полной информации о состоянии автомобиля или коэффициенте трения между шиной и дорогой. По мере появления большего количества датчиков и усложнения целей управления конструкторам автомобилей необходимо будет реализовать более целостную схему управления, такую как контроль зоны действия самолета, которая объединяет несколько датчиков и исполнительных механизмов, чтобы поддерживать транспортное средство в безопасном рабочем режиме.
Эта диссертация описывает два начальных строительных блока для полной системы управления автомобилем. Первый, называемый Vehicle Envelope Control, стабилизирует автомобиль, удерживая его в безопасной области пространства состояний скорости рыскания-бокового скольжения. Анализ изоклин ускорения рыскания на фазовой плоскости скорости рыскания-бокового скольжения позволяет определить границу огибающей, которая согласуется с динамикой естественной системы. Выбранная граница определяется нулевой линией ускорения по рысканью при максимальном угле поворота, что приводит к стабильной динамике разомкнутого контура, и линиями максимального заднего угла скольжения, которые предотвращают насыщение задней шины.Границы оболочки устанавливаются привлекательным контроллером, определяемым расстоянием между состояниями транспортного средства и безопасной границей. Пропорциональный контроллер внутренней границы обеспечивает мягкую посадку на границах скорости рыскания, ограничивая угол поворота водителя до максимально стабильного угла поворота при приближении транспортного средства к границе. Чтобы доказать эффективность контроллера, управляемый по проводам автомобиль P1 Стэнфорда выполняет несколько маневров, во время которых контроллер должен активироваться для стабилизации автомобиля.
Второй строительный блок для всей системы управления транспортным средством включает определение и реализацию механических изменений, необходимых для улучшения оценки коэффициента трения шины и пикового бокового усилия в шине. Возможность надежной оценки трения позволяет обновлять границы огибающей в реальном времени, ослабляя их по мере увеличения трения и ограничивая их по мере уменьшения трения. Выделение центрирующего момента, части реактивного момента оси поворота от поперечных сил в шинах, дает информацию о трении; однако обычно существует несколько других моментов, которые ощущаются вокруг оси рулевого управления, которые необходимо оценить и вычесть перед тем, как можно будет определить центрирующий момент.Предлагаемая конструкция подвески исключает влияние этих других крутящих моментов, так что центрирующий момент измеряется напрямую.
Назначение стабилизатора поперечной устойчивости, звеньев и втулок · BlueStar Inspections
При повороте за рулем автомобиля вы могли заметить, что ваше тело имеет тенденцию двигаться к внешней стороне поворота. То же самое происходит со всеми частями вашего автомобиля во время поворота.Кроме того, части автомобиля с внешней стороны поворота толкаются вниз по направлению к дороге, а части автомобиля с внутренней стороны поворота поднимаются вверх и от дороги. Если вы сделаете поворот достаточно быстро, шины на внутренней стороне поворота могут фактически оторваться от дороги, и автомобиль может перевернуться.
Крен кузова происходит, когда больший вес приходится на внешние шины и меньший — на внутренние, что, в свою очередь, снижает тягу и управляемость автомобиля.В идеале кузов автомобиля должен оставаться плоским на протяжении всего поворота, чтобы вес равномерно распределялся на всех четырех шинах. Еще более идеальным сценарием была бы точно настроенная подвеска транспортного средства, которая уменьшала бы крен кузова, удерживала бы автомобиль в плоском состоянии и не нарушала бы независимое движение каждой шины.
Система стабилизатора поперечной устойчивости является частью большинства систем подвески автомобиля. Он предназначен для уменьшения крена кузова и точной настройки подвески, как указано в идеальном сценарии выше.Он соединяет передние колеса (левое и правое) и, во многих случаях, задние колеса посредством коротких звеньев, соединенных с компонентом подвески на каждом колесе. Стабилизаторы поперечной устойчивости также называются стабилизаторами поперечной устойчивости, стабилизаторами поперечной устойчивости, стабилизаторами поперечной устойчивости и поперечными балками.
Системы стабилизатора поперечной устойчивости состоят из нескольких компонентов, включая саму штангу стабилизатора, тяги стабилизатора, втулки или гнезда тяги стабилизатора, втулки стабилизатора поперечной устойчивости к раме автомобиля и кронштейны втулок, удерживающие втулки на месте на раме или несущем элементе.Все эти компоненты предназначены для того, чтобы заставить противоположные стороны транспортного средства опускаться или подниматься на одинаковую высоту и уменьшать крен кузова транспортного средства на поворотах, крутых поворотах или на больших неровностях.
Стабилизатор поперечной устойчивости предназначен для удержания кузова автомобиля в горизонтальном положении за счет перемещения силы с одной стороны кузова на противоположную. Чтобы понять, как работает стабилизатор поперечной устойчивости, представьте себе металлический стержень, сделанный из стальной трубы, диаметром от одного до двух дюймов и U-образной формы. Если ваши передние колеса находятся на расстоянии пяти футов друг от друга, стержень будет примерно четырех футов в длину и находиться между двумя колесами.Шток надежно прикреплен к раме или цельному элементу автомобиля в двух местах. Втулки и кронштейны используются для того, чтобы стержень мог изгибаться и вращаться, но оставаться в том положении, в котором он прикреплен к раме автомобиля. Связи или рычаги используются для прикрепления концов стержня к компоненту подвески, обычно к нижнему рычагу управления или другому компоненту, удерживающему колесо, с обеих сторон. Звенья имеют втулки или шарниры с шарнирными головками для большей гибкости и управляемости.
Когда ваш автомобиль начинает разворачиваться, компонент подвески за пределами поворота толкается вниз.Тяга, прикрепленная к штанге стабилизатора, также толкается вниз и прикладывает скручивающее или скручивающее движение к U-образной штанге. Затем торсион перемещает звено на другом конце стержня, заставляя подвеску на другой стороне автомобиля также реагировать. Это заставляет кузов автомобиля оставаться более плоским в повороте, поскольку подвеска на внешней стороне поворота принудительно поднимается, а подвеска на внутренней стороне поворота принудительно опускается, таким образом стабилизируя распределение высоты во время поворота.
Если у вашего автомобиля нет стабилизатора поперечной устойчивости, скорее всего, у него будут проблемы с креном кузова при повороте. Если стабилизатор поперечной устойчивости обеспечивает слишком большую стабилизацию, ваше транспортное средство потеряет независимость между элементами подвески на противоположных сторонах транспортного средства. Стабилизатор поперечной устойчивости также влияет на комфорт езды, распределяя воздействие неровностей дороги на обе стороны автомобиля. Тяги стабилизатора поперечной устойчивости обычно крепятся к нижнему рычагу подвески. Их износ может отрицательно повлиять на рулевое управление и управляемость.Чаще всего виноваты резиновые втулки или шаровые опоры, которые рассчитаны на то, чтобы выдерживать большую часть ударов и защищать металлические детали от износа.
Скрипы могут возникать, если между втулками стабилизатора поперечной устойчивости и втулками рамы проникла вода, в результате чего на втулках и металлическом стержне в местах соприкосновения с втулками образуется ржавчина. Втулки также могут затвердеть, потрескаться и высохнуть, что также приведет к появлению скрипов. Эти скрипы будут заметны при движении по неровностям, поворотам или в любое время, когда штанга испытывает скручивание и вращается во втулках.
Когда компоненты стабилизатора поперечной устойчивости начинают изнашиваться, симптомы могут варьироваться от едва заметных до значительных. Тяги стабилизатора поперечной устойчивости должны плотно прилегать, без люфта или движения, кроме как между резиновыми втулками, или контролируемого движения шарнира. Когда звенья изношены, стабилизатор поперечной устойчивости начинает издавать дребезжащие и лязгающие звуки, особенно когда вы проезжаете повороты или неровности. Распространенные признаки неисправности компонентов стабилизатора поперечной устойчивости включают дребезжание или лязг из области покрышек, плохое управление, чрезмерный крен кузова, скрип и ощущение слабого или неровного рулевого управления.
Компоненты стабилизатора поперечной устойчивости следует осматривать визуально, а также их следует выслушивать во время движения.