
формула, как найти, коэффициент, обозначение
Определение
Жесткость — способность твёрдого тела, конструкции или её элементов сопротивляться деформации от приложенного усилия вдоль выбранного направления в заданной системе координат.
Сила жесткости — сила, возникающая в теле в результате его деформации и стремящаяся вернуть его в исходное состояние.
Осторожно! Если преподаватель обнаружит плагиат в работе, не избежать крупных проблем (вплоть до отчисления). Если нет возможности написать самому, закажите тут.
От чего зависит жесткость
Жесткость пружины зависит от нескольких параметров:
- геометрии пружины;
- типа материала;
- коэффициента;
- срока эксплуатации.
Геометрия пружины
На жесткость витой пружины влияет:
- количество витков;
- их диаметр;
- диаметр проволоки.


Диаметр намотки измеряется от оси пружины. Так как длина проволоки в пружине значительно больше длины упругого стержня, сопротивляемость внешней деформации многократно возрастает.
Волновые пружины состоят из металлических лент, навитых ребром по окружности заданного диаметра.
Их основные геометрические параметры:
- количество витков;
- количество волн на виток;
- сечение ленты.
Тип материала
У каждого материала есть условный предел упругости, характеризующий его способность восстанавливаться после деформации. Если этот предел превышается, в структуре материала возникают необратимые изменения.
ОпределениеПредел упругости — механическая характеристика материала, показывающая максимальное напряжение, при котором имеют место только упругие, обратимые деформации.
Предел упругости измеряют в паскалях и определяют по формуле:
\(\sigma_{у\;}=\;\frac FS\)
где F — действие внешней силы на исследуемый образец, приводящее к повреждениям, а S — его площадь.
Кроме предела упругости, существуют такие характеристики упругости материалов, как модули упругости (модуль Юнга) и сдвига, коэффициент жесткости и другие. Все они взаимосвязаны, поэтому, выяснив значение одной из величин с помощью справочной таблицы, можно вычислить другие.
Коэффициент
ОпределениеСогласно закону Гука, при малой деформации абсолютная величина силы упругости прямо пропорциональна величине деформации.
Эта линейная зависимость описывается формулой:
\(F=\;k\;\times\;x\)
где k — коэффициент жесткости, а х — величина, на которую сжалась или растянулась пружина.
Деформация считается малой в том случае, когда изменение размеров тела значительно меньше его первоначальных размеров.
Срок эксплуатации
Нахождение под напряжением приводит к постепенной необратимой деформации, называемой ослаблением пружины.
Жесткость пружины влияет на срок ее эксплуатации, как и сила воздействия.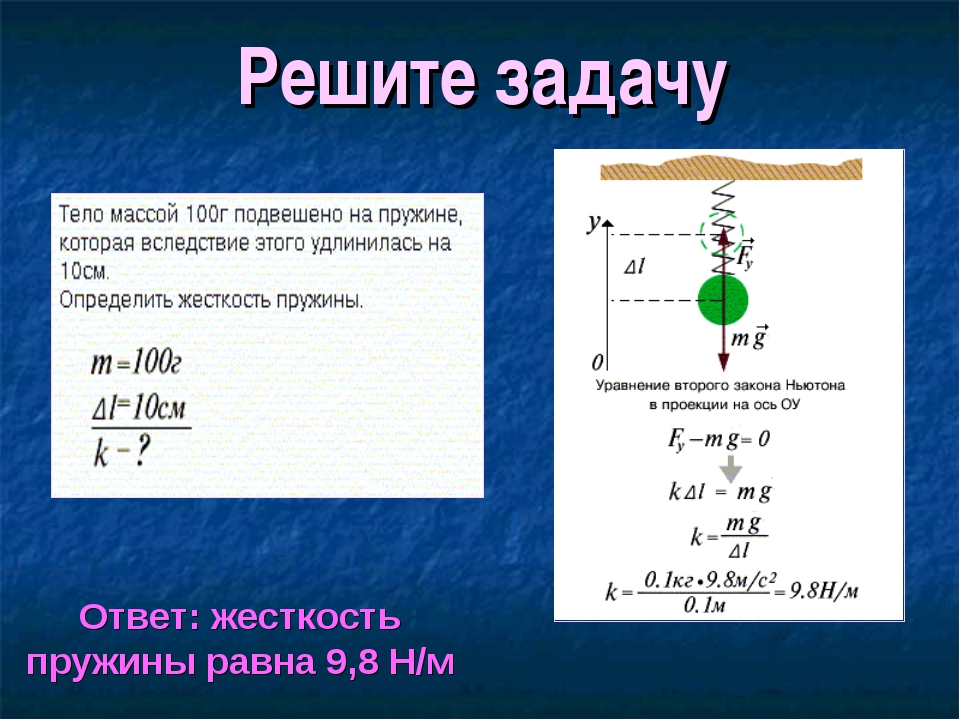 Конструкторы пружин, предварительно рассчитав эти параметры, проводят тесты на прототипах, прежде чем начать массовое производство. В специальных установках для испытания на усталость материала их сжимают и отпускают определенное количество циклов, отдельно проверяя поведение пружин при максимальной и минимальной нагрузке.
Конструкторы пружин, предварительно рассчитав эти параметры, проводят тесты на прототипах, прежде чем начать массовое производство. В специальных установках для испытания на усталость материала их сжимают и отпускают определенное количество циклов, отдельно проверяя поведение пружин при максимальной и минимальной нагрузке.
В чем измеряется жесткость
Жесткость пружины в системе СИ измеряется в ньютонах на метр, Н/м. Также встречается единица измерения ньютон на миллиметр, Н/мм. Численно жесткость равна величине силы, изменяющей размер пружины на метр длины.
Как обозначается
Коэффициент жесткости пружины обозначают буквой k.
Коэффициент жесткости пружины
ОпределениеКоэффициент жесткости — коэффициент, связывающий в законе Гука удлинение упругого тела и возникающую вследствие этого удлинения силу жесткости.
Применяется в механике твердого тела в разделе упругости.
Формула расчета через массу и длину
Используя закон Гука, коэффициент жесткости можно вычислить по формуле:
\(k\;=\;\frac Fx\)
Чтобы выяснить силу тяжести, воздействующую на пружину, нужно воспользоваться формулой:
\(F\;=\;m\;\times\;g\)
где m — масса подвешенного на пружине тела, а g — величина свободного ускорения, равная 9,8.
Чтобы найти х, нужно дважды измерить длину пружины и вычислить разницу между этими двумя значениями.
При соединении нескольких пружин общая жесткость системы меняется. Коэффициенты каждой из пружин суммируются при параллельном соединении. При последовательном соединении общая жесткость вычисляется по формуле:
\(\frac1k\;=\;(\frac1{k_1}\;+\;\frac1{k_2}\;+\;…\;+\;\frac1{k_n})\)
Как можно измерить жесткость
Измерительные приборы
Приборы для испытания пружин на сжатие-растяжение контролируют приложенное усилие с помощью тензометрического датчика, а также изменение их длины, выводя показатели на дисплей. Без специального прибора измерить осевую жесткость можно, используя динамометр и линейку.
Без специального прибора измерить осевую жесткость можно, используя динамометр и линейку.
Существуют приборы и для измерения поперечной жесткости пружин. Для этого нужно измерить смещение нескольких точек пружины, определив расстояние и угол между ними.
Практическая задача
Самый простой способ измерить жесткость пружины — провести стандартный школьный опыт со штативом и подвешенными на пружине грузиками.
Для измерения осевой жесткости спиральной пружины используют:
- штатив, на котором закрепляют пружину;
- крючок, который крепят на свободный ее конец;
- грузики с известной массой, которые подвешивают на свободный конец пружины;
- линейку, чтобы измерить длину пружины с грузом и без груза.
Проведя несколько измерений с грузиками разной массы и вычислив силу тяжести, воздействовавшую на пружину в каждом из них, можно построить график зависимости длины пружины от приложенного усилия и узнать среднее значение коэффициента жесткости. 3\;\times\;25}\)
3\;\times\;25}\)
\(k = 100 \frac Нм\)
Жесткость при деформации кручения существенно отличается от жесткости сжатия-растяжения. Предел прочности при кручении у любого материала будет меньше, чем предел прочности при сжатии-растяжении или изгибе. Торсионная жесткость, также называемая крутильной, в системе СИ измеряется в ньютон-метрах на радиан, сокращенно Н-м/рад. Ее можно определить по формуле:
\(k\;=\;\frac M\alpha\)
где \(М\) — крутящий момент, приложенный к телу, а \(\alpha\) — угол закручивания тела по оси приложения крутящего момента.
Обозначение жесткость пружины
Как маркируются пружины, что означает цвет пружин автомобилей ВАЗ
Пружины подвески выполняют несколько важных функций. Кроме существенного влияния на управляемость и грузоподъемность транспортного средства, они еще сглаживают неровности дорожного покрытия, и повышают комфортность во время движения. Однако очень важно, чтобы в ходовой части были использованы пружины одного класса. Чтобы избежать ошибок при их установке, на предприятиях изготовителях в обязательном порядке производится маркировка пружин.
Чтобы избежать ошибок при их установке, на предприятиях изготовителях в обязательном порядке производится маркировка пружин.
Классификация
Различают несколько видов пружин:
- Стандартные. Как правило, устанавливаются на заводе изготовителе транспортного средства, и обеспечивают его эксплуатацию в условиях паспортных параметров нагрузки.
- Усиленные. Отличаются большей жесткостью и улучшают эксплуатационные характеристики транспортного средства во время движения по проселочным дорогам, или при транспортировании прицепа.
- Повышающие. Способствуют увеличению клиренса и грузоподъемности.
- Понижающие. Уменьшают клиренс и снижают высоту центра тяжести. Устанавливаются любителями динамического стиля вождения.
Все они, независимо от того, к какому виду относятся, имеют специфические особенности при изготовлении.
Особенности изготовления
Производство данного элемента подвески, является одним из сложнейших процессов в ходе изготовления деталей и узлов, входящих в состав автомобиля. Этот процесс характеризуется большим количеством сложных технологических операций, многие из которых очень плохо поддаются контролю. Поэтому добиться идентичности всех необходимых параметров, при серийном или массовом производстве практически невозможно. В связи с этим на предприятиях-изготовителях, вынуждены проводить сравнительный анализ и осуществлять цветовую маркировку пружин с идентичными характеристиками.
Этот процесс характеризуется большим количеством сложных технологических операций, многие из которых очень плохо поддаются контролю. Поэтому добиться идентичности всех необходимых параметров, при серийном или массовом производстве практически невозможно. В связи с этим на предприятиях-изготовителях, вынуждены проводить сравнительный анализ и осуществлять цветовую маркировку пружин с идентичными характеристиками.
Отличия пружин подвески и их маркировка
Основным идентификационным параметром любой пружины служит ее наружный диаметр. Производители не могут его самопроизвольно изменить, так как этот размер определяется конструктивными особенностями самого автомобиля. Все остальные параметры могут быть абсолютно различными. Так производители могут:
- изменить диаметр прута, из которого она изготавливается и даже использовать прут, имеющий диаметр переменного значения;
- изготавливать пружины одинаковой высоты, но различной жесткости;
- изменить межвитковое расстояние и количество витков, сохраняя при этом жесткость.

Поэтому на заводах перед установкой проводят контроль статистической нагрузки. Проводится такая операция следующим образом: измеряют высоту пружины, сжав ее с определенным усилием. Так как для каждой конкретной модели автомобиля высота в сжатом состоянии регламентирована полем допуска, то детали, не попавшие в это поле, выбраковываются.
Пружины, попавшие в границы верхнего поля допуска относят к классу А (длинные), а в категорию В (короткие) попадают те, что имеют высоту в пределах нижнего поля допуска. Далее пружины одного класса маркируют краской, причем цвет маркировки зависит от модели автомобиля, на котором они должны быть установлены.
- Пружины класса А автомобилей ВАЗ маркируют по цвету желтой, белой, коричневой и оранжевой красками.
- Вид В также маркируют по цвету, но зеленой, голубой, синей и черной красками.
Маркировка по цвету наносится на внешнюю сторону витков в виде цветной полоски. Обилие цветов маркировочной краски объясняется тем, что с целью уменьшения влияния коррозии, они подвергают специальному покрытию (хлоркаучуковая эмаль или защитное эпоксидное покрытие), которое также бывает разного цвета (черное, серое, синее, белое, голубое) и определяет как модель автомобиля, так и назначение пружины (передняя или задняя).
Важное
Класс А, также как и класс В, имеют абсолютно равнозначное право на существование. Маркировка по цветам была введена для того, чтобы исключить разницу в их высоте на противоположных бортах автомобиля. Ведь установка пружин разной высоты с двух сторон одной оси автомобиля приведет к ухудшению его управляемости и устойчивости, а также приведет к скорому выходу из строя деталей ходовой части.
Специалисты рекомендуют использовать пружины только одного класса. Допускается в передней подвеске применять класс А, а в задней — класс В. Если же в передней подвеске использованы пружины класса В, то установка в задней подвеске класса А запрещается категорически. В любом случае на одной оси в обязательном порядке должны быть установлены пружины как одного вида, так и одного класса.
Интересно
Очень часто маркировку классов А и В еще называют маркировкой по жесткости. Действительно, если необходимо регулярно осуществлять поездки с полной нагрузкой, то лучше использовать класс А, так как они выдерживают несколько большую нагрузку. Однако разница эта невелика и составляет примерно 25 кг.
Маркировку в соответствии с требованиями действующих стандартов, изготовители наносят не всегда. Однако цветовая маркировка пружины, относящая ее к определенному классу, должна быть нанесена обязательно. Мало того, она должна быть одинаковой на обеих приобретаемых пружинах, соответствующих друг другу по цвету. Если такая цветовая маркировка отсутствует, то лучше воздержаться от их приобретения.
Коэффициент жесткости пружины
Пружины можно назвать одной из наиболее распространенных деталей, которые являются частью простых и сложных механизмов. При ее изготовлении применяется специальная проволока, накручиваемая по определенной траектории. Выделяют довольно большое количество различных параметров, характеризующих это изделие. Наиболее важным можно назвать коэффициент жесткости. Он определяет основные свойства детали, может рассчитываться и применяться в других расчетах. Рассмотрим особенности подобного параметра подробнее.
Наиболее важным можно назвать коэффициент жесткости. Он определяет основные свойства детали, может рассчитываться и применяться в других расчетах. Рассмотрим особенности подобного параметра подробнее.
Определение и формула жесткости пружины
При рассмотрении того, что такое коэффициент жесткости пружины следует уделить внимание понятию упругости. Для ее обозначения применяется символ F. При этом сила упругости пружины характеризуется следующими особенностями:
- Проявляется исключительно при деформации тела и исчезает в случае, если деформация пропадает.
- При рассмотрении, что такое жесткость пружины следует учитывать, после снятия внешней нагрузки тело может восстанавливать свои размеры и форму, частично или полностью. В подобном случае деформация считается упругой.
Не стоит забывать о том, что жесткость – характеристика, свойственная упругим телам, способным деформироваться. Довольно распространенным вопросом можно назвать то, как обозначается жесткость пружины на чертежах или в технической документации. Чаще всего для этого применяется буква k.
Чаще всего для этого применяется буква k.
Слишком сильная деформация тела становится причиной появления различных дефектов. Ключевыми особенностями можно назвать следующее:
- Деталь может сохранять свои геометрические параметры при длительной эксплуатации.
- При увеличении показателя существенно снижается сжатие пружины под воздействие одинаковой силы.
- Наиболее важным параметром можно назвать коэффициент жесткости. Он зависит от геометрических показателей изделия, типа применяемого материала при изготовлении.
Довольно большое распространение получили красные пружины и другого типа. Цветовое обозначение применяется в случае производства автомобильных изделий. Для расчета применяется следующая формула: k=Gd4/8D3n. В этой формуле указываются нижеприведенные обозначения:
- G – применяется для определения модуля сдвига. Стоит учитывать, что это свойство во многом зависит от применяемого материала при изготовлении витков.
- d – диаметральный показатель проволоки. Она производится путем проката. Этот параметр указывается также в технической документации.
- D – диаметр создаваемых витков при накручивании проволоки вокруг оси. Он подбирается в зависимости от поставленных задач. Во многом диаметр определяет то, какая нагрузка оказывается для сжатия устройства.
- n – число витков. Этот показатель может варьировать в достаточно большом диапазоне, также влияет на основные эксплуатационные характеристики изделия.
 Она производится путем проката. Этот параметр указывается также в технической документации.
Она производится путем проката. Этот параметр указывается также в технической документации.Рассматриваемая формула применяется в случае расчета коэффициента жесткости для цилиндрических пружин, которые устанавливаются в самых различных механизмах. Подобная единица измеряется в Ньютонах. Коэффициент жесткости для стандартизированных изделий можно встретить в технической литературе.
Формула жесткости соединений пружин
Не стоит забывать о том, что в некоторых случаях проводится соединение тела нескольким пружинами. Подобные системы получили весьма широкое распространение. Определить жесткость в этом случае намного сложнее. Среди особенностей соединения можно отметить нижеприведенные моменты:
Среди особенностей соединения можно отметить нижеприведенные моменты:
- Параллельное соединение характеризуется тем, что детали размещаются последовательно. Подобный метод позволяет существенно повысить упругость создаваемой системы.
- Последовательный метод характеризуется тем, что деталь подключаются друг к другу. Подобный способ подсоединения существенно снижает степень упругости, однако позволяет существенно увеличить максимальное удлинение. В некоторых случаях требуется именно максимальное удлинение.
В обеих случаях применяется определенная формула, которая определяет особенности подключения. Модуль силы упругости может существенно отличаться в зависимости от особенностей конкретного изделия.
При последовательном соединении изделий показатель рассчитывается следующим образом: 1/k=1/k1+1/k2+…+1/kn. Рассматриваемый показатель считается довольно важным свойством, в данном случае он снижается. Параллельный метод подключения рассчитывается следующим образом: k=k1+k2+…kn.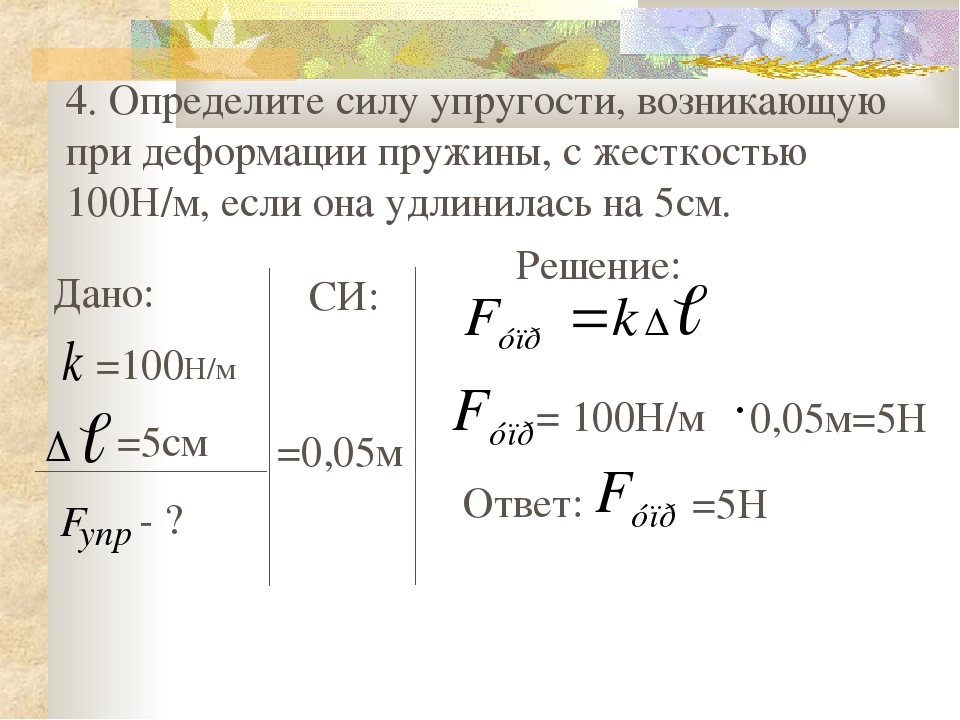
Подобные формулы могут использоваться при самых различных расчетах, чаще всего на момент решения математических задач.
Коэффициент жесткости соединений пружин
Приведенный выше показатель коэффициента жесткости детали при параллельном или последовательном соединении определяет многие характеристики соединения. Довольно часто проводится определение тому, чему равно удлинение пружины. Среди особенностей параллельного или последовательного соединения можно отметить нижеприведенные моменты:
- При параллельном подключении удлинение обоих изделий будет равным. Не стоит забывать о том, что оба варианта должны характеризоваться одинаковой длиной в свободном положении. При последовательном показатель увеличивается в два раза.
- Свободное положение – ситуация, в которой деталь находится без прикладывания нагрузки. Именно оно в большинстве случаев учитывается при проведении расчетов.
- Коэффициент жесткости изменяется в зависимости от применяемого способа подсоединения. В случае параллельного соединения показатель увеличивается в два раза, при последовательном уменьшается.
 В случае параллельного соединения показатель увеличивается в два раза, при последовательном уменьшается.
В случае параллельного соединения показатель увеличивается в два раза, при последовательном уменьшается.Для проведения расчетов нужно построить схему подключения всех элементов. Основание представлено линией со штриховкой, изделие обозначается схематически, а тело в упрощенном виде. Кроме этого, от упругой деформации во многом зависит кинетическая и другая энергия.
Коэффициент жесткости цилиндрической пружины
На практике и в физике довольно большое распространение получили именно цилиндрические пружины. Их ключевыми особенностями можно назвать следующие моменты:
- При создании указывается центральная ось, вдоль которой и действует большинство различных сил.
- При производстве рассматриваемого изделия применяется проволока определенного диаметра. Она изготавливается из специального сплава или обычных металлов. Не стоит забывать о том, что материал должен обладать повышенной упругостью.
- Проволока накручивается витками вдоль оси. При этом стоит учитывать, что они могут быть одного или разного диаметра. Довольно большое распространение получил вариант исполнения цилиндрического типа, но большей устойчивостью характеризуется цилиндрический вариант исполнения, в сжатом состоянии деталь обладает небольшой толщиной.
- Основными параметрами можно назвать больший, средний и малый диаметр витков, диаметр проволоки, шаг расположения отдельных колец.
 Довольно большое распространение получил вариант исполнения цилиндрического типа, но большей устойчивостью характеризуется цилиндрический вариант исполнения, в сжатом состоянии деталь обладает небольшой толщиной.
Довольно большое распространение получил вариант исполнения цилиндрического типа, но большей устойчивостью характеризуется цилиндрический вариант исполнения, в сжатом состоянии деталь обладает небольшой толщиной.Не стоит забывать о том, что выделяют два типа деталей: сжатия и растяжения. Их коэффициент жесткости определяется по одной и той же формуле. Разница заключается в следующем:
- Вариант исполнения, рассчитанный на сжатие, характеризуется дальним расположением витков. За счет расстояние между ними есть возможность сжатия.
- Модель, рассчитанная на растяжение, имеет кольца, расположенные практически вплотную. Подобная форма определяет то, что при максимальная сила упругости достигается при минимальном растяжении.
- Также есть вариант исполнения, который рассчитан на кручение и изгиб. Подобная деталь рассчитывается по определенным формулам.
 Подобная деталь рассчитывается по определенным формулам.
Подобная деталь рассчитывается по определенным формулам.Расчет коэффициента цилиндрической пружины может проводится при использовании ранее указанной формулы. Она определяет то, что показатель зависит от следующих параметров:
- Наружного радиуса колец. Как ранее было отмечено, при изготовлении детали применяется ось, вокруг которой проводится накручивание колец. При этом не стоит забывать о том, что выделяют также средний и внутренний диаметр. Подобный показатель указывается в технической документации и на чертежах.
- Количества создаваемых витков. Этот параметр во многом определяет длину изделия в свободном состоянии. Кроме этого, количество колец определяет коэффициент жесткость и многие другие параметры.
- Радиуса применяемой проволоки. В качестве исходного материала применяется именно проволока, которая изготавливается из различных сплавов. Во многом ее свойства оказывают влияние на качества рассматриваемого изделия.
- Модуля сдвига, который зависит от типа применяемого материала.

Коэффициент жесткости считается одним из наиболее важных параметров, который учитывается при проведении самых различных расчетов.
Единицы измерения
При проводимых расчетах также должно учитываться то, в каких единицах измерениях проводятся вычисления. При рассмотрении того, чему равно удлинение пружины уделяется внимание единице измерения в Ньютонах.
Для того чтобы упростить выбор детали многие производители указывают его цветовым обозначением.
Разделение пружины по цветам проводится в сфере автомобилестроения.
Среди особенностей подобной маркировки отметим следующее:
- Класс А обозначается белым, желтым, оранжевым и коричневым оттенками.
- Класса В представлен синим, голубым, черным и желтым цветом.
Как правило, подобное свойство отмечается на внешней стороне витка. Производители наносят небольшую полоску, которая и существенно упрощает процесс выбора.
Особенности расчета жесткости соединений пружин
Приведенная выше информация указывает на то, что коэффициент жесткости является довольно важным параметром, который должен рассчитываться при выборе наиболее подходящего изделия и во многих других случаях. Именно поэтому довольно распространенным вопросом можно назвать то, как найти жесткость пружины. Среди особенностей соединения отметим следующее:
Именно поэтому довольно распространенным вопросом можно назвать то, как найти жесткость пружины. Среди особенностей соединения отметим следующее:
- Провести определение растяжения пружины можно при вычислении, а также на момент теста. Этот показатель может зависеть в зависимости от проволоки и других параметров.
- Для расчетов могут применяться самые различные формулы, при этом получаемый результат будет практически без погрешностей.
- Есть возможность провести тесты, в ходе которых и выявляются основные параметры. Определить это можно исключительно при применении специального оборудования.
Как ранее было отмечено, выделяют последовательный и параллельный метод соединения. Оба характеризуются своими определенными особенностями, которые должны учитываться.
В заключение отметим, что рассматриваемая деталь является важной частью конструкции различных механизмов. Неправильный вариант исполнения не сможет прослужить в течение длительного периода. При этом не стоит забывать о том, что слишком сильная деформация становится причиной ухудшения эксплуатационных характеристик.
При этом не стоит забывать о том, что слишком сильная деформация становится причиной ухудшения эксплуатационных характеристик.
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Маркировка пружин по цвету
Все пружины, выпускаемые изготовителем, маркируются разными цветами. Маркировка пружин по цвету в магазине необходима для наглядного определения жесткости приобретаемой пружины.
Пружины ВАЗ. Маркировка пружины по цветуКлассы пружин по жесткости
Каждому образцу пружины перед выпуском с завода устанавливается определенный класс. Так, класс «А» присваивается пружинам, у которых наблюдается попадание в верхнее поле допуска, и класс «В» — пружинам, высота которых близка к нижнему полю допуска.
- Классу «А» присвоены следующие цветовые маркеры жесткости пружин – белая, желтая, оранжевая и коричневая.
- Классу «В» — черная, синяя, голубая и желтая цветовая маркировка пружин.
Маркировка пружин по цвету.
 Таблица
ТаблицаОпределить жесткость пружин можно не цвету внешнего вида. Многие считают, что пружины желтого цвета – усиленные, красные – спортивные и т.д. В этом нет правды. Пружины окрашивают краской разных цветов для защиты от коррозии.Определяется жесткость пружин по маркерам, нанесенным на внешнюю сторону витка. Таблица соответствия цветового маркера на внешней стороне пружины и ее жесткости приведена ниже:
Таблица цветовой маркировки пружин автомобиляРекомендации выбора пружин
На автомобиль всегда устанавливают пружины одного класса, чтобы машина не теряла упругих свойств подвески и управляемости. Не рекомендуется также ставить пружины разного класса впереди и сзади автомобиля. Это приведет к нарушению баланса авто на высоких скоростях и проезде поворотов. Если есть такая необходимость, то допускается установка пружин класса «А» в переднюю подвеску, и пружин класса «В» в заднюю.
Для кроссоверов и автомобилей большей проходимости часто ставят пружины класса «А». Они выдерживают немного большие нагрузки и имеют больший ход по сравнению с классом «В».
Они выдерживают немного большие нагрузки и имеют больший ход по сравнению с классом «В».
Не пренебрегайте покупкой более дорогих пружин, пружин более высокого класса. Спасибо Вам скажет и подвеска автомобиля, и Ваше состояние в длинной и долгой поездке. Более мягкая езда снизит вибрационные нагрузки на водителя, которые часто приводят последнего к быстрой утомляемости и снижению концентрации.
Цветовая маркировка пружин «Спорт»
Со спортивными пружинами цвет не имеет значения и является выбором компании. Зеленые, синие, красные или желтые пружины не указывают на степень их жесткости. Таким образом, разные цвета пружин являются характерной чертой производителя. Они используются для облегчения распознавания бренда, и это не имеет ничего общего с масштабом или характеристиками их работы.
Жесткость пружины определяется цветовой шкалой, размещенной только на витках пружины, или точками, пробитыми на них (…) или выемками (IIIII). Вы также можете найти окрашенные пятна (оооо). Их число означает твердость пружины.
Их число означает твердость пружины.
Согласно стандартам, жесткость пружины должна быть именно выбита на пружине, а не окрашено, запомните это.
УСТАНОВКА ПРУЖИН АВТОМОБИЛЯ ПО ЖЕСТКОСТИ ВАЗ
Для правильной установки пружин на автомобили ВАЗ используют цветовую маркировку по жесткости.
Изготовление пружин автомобиля после всех операций подвергается последнему этапу, а именно осуществляется контроль статической нагрузки пружины. У пружин подвески автомобиля существуют допустимые значения контрольной нагрузки. Пружины автомобиля классифицируют по двум признакам:
- Плюсовой допуск (жесткие) – класс А;
- Минусовой допуск (мягкие) – класс В;
В зависимости от класса пружины подвески метятся краской на внешней стороне витков.
ЦВЕТОВАЯ МАРКИРОВКА жесткости ПРУЖИН ВАЗ
КАКИЕ ПРУЖИНЫ ЛУЧШЕ ВАЗ?
Большинство пружин подвески устанавливаемых на автомобили метятся зеленой и желтой краской. Зеленой обозначаются жесткие, а желтой мягкие.
Какие пружины лучше мягкие или жесткие?
Здесь мы поговорим о разнице этих пружин и на что она влияет. Разновидность классов пружин помогает уменьшить разницу между длиной пружин правого и левого бортов автомобиля, что делает управление автомобилем более удобным и правильным, ведь при таком раскладе автомобиль ведет себя более устойчиво.
Производители рекомендуют устанавливать пружины одного класса. В исключительных случаях разрешается устанавливать на переднюю ось более жесткие пружины, а на заднюю более мягкие. При установке пружин разного класса ставить мягкие пружины (класс В) на передок не стоит. Выбор пружин подвески зависит от того как вы ездите, если подвеска автомобиля подвергается большим нагрузкам лучше выбрать жесткие пружины, они продержатся немного дольше. Но заметьте разница будет ощущаться в районе 20-30 килограмм нагрузки.
Если вы установили мягкие пружины на передок, обязательно установите такие же на задок. При разных раскладах на разных бортах одной оси автомобиля должны быть установлены пружины одного класса – и на правом и на левом.
Коэффициент жесткости пружины, формула и примеры
Онлайн калькуляторыНа нашем сайте собрано более 100 бесплатных онлайн калькуляторов по математике, геометрии и физике.
СправочникОсновные формулы, таблицы и теоремы для учащихся. Все что нужно, чтобы сделать домашнее задание!
Заказать решениеНе можете решить контрольную?! Мы поможем! Более 20 000 авторов выполнят вашу работу от 100 руб!
Сила упругости (), которая возникает в результате деформации тела, в частности пружины, направленная в сторону противоположную перемещению частиц, деформируемого тела, пропорциональна удлинению пружины:
Он зависит от формы тела, его размеров, материала из которого изготовлено тело (пружина).
Иногда коэффициент жесткости обозначают буквами D и с.
Величина коэффициента жёсткости пружины указывает на устойчивость ее к действию нагрузок и насколько велико ее сопротивление при воздействии.
Коэффициент жесткости соединений пружин
Если некоторое число пружин соединить последовательно, то суммарную жесткость такой системы можно вычислить как:
В том случае, если мы имеем дело с n пружинами, которые соединены параллельно, то результирующую жесткость получают как:
Коэффициент жесткости цилиндрической пружины
Рассмотрим пружину в виде спирали, которая сделана из проволоки с сечением круг. Если рассматривать деформацию пружины как совокупность элементарных сдвигов в ее объеме под воздействие сил упругости, то коэффициент жесткости можно вычислить при помощи формулы:
Если рассматривать деформацию пружины как совокупность элементарных сдвигов в ее объеме под воздействие сил упругости, то коэффициент жесткости можно вычислить при помощи формулы:
где — радиус пружины, — количество витков в пружине, — радиус проволоки, — модуль сдвига (постоянная, которая зависит от материала).
Единицы измерения
Основной единицей измерения коэффициента жесткости в системе СИ является:
В СГС:
= дин/см
Примеры решения задач
| Понравился сайт? Расскажи друзьям! | |
Сила тяжести, трения, реакции опоры, упругости, Архимеда, сопротивления, вес. Направление, точка приложения, природа возникновения
Тестирование онлайн
Что надо знать о силе
Сила — векторная величина. Необходимо знать точку приложения и направление каждой силы. Важно уметь определить какие именно силы действуют на тело и в каком направлении. Сила обозначается как , измеряется в Ньютонах. Для того, чтобы различать силы, их обозначают следующим образом
Сила обозначается как , измеряется в Ньютонах. Для того, чтобы различать силы, их обозначают следующим образом
Ниже представлены основные силы, действующие в природе. Придумывать не существующие силы при решении задач нельзя!
Сил в природе много. Здесь рассмотрены силы, которые рассматриваются в школьном курсе физики при изучении динамики. А также упомянуты другие силы, которые будут рассмотрены в других разделах.
Сила тяжести
На каждое тело, находящееся на планете, действует гравитация Земли. Сила, с которой Земля притягивает каждое тело, определяется по формуле
Точка приложения находится в центре тяжести тела. Сила тяжести всегда направлена вертикально вниз.
Сила трения
Познакомимся с силой трения. Эта сила возникает при движении тел и соприкосновении двух поверхностей. Возникает сила в результате того, что поверхности, если рассмотреть под микроскопом, не являются гладкими, как кажутся. Определяется сила трения по формуле:
Сила приложена в точке соприкосновения двух поверхностей. Направлена в сторону противоположную движению.
Направлена в сторону противоположную движению.
Так как тело представляем в виде материальной точки, силу можно изображать с центра
Сила реакции опоры
Представим очень тяжелый предмет, лежащий на столе. Стол прогибается под тяжестью предмета. Но согласно третьему закону Ньютона стол воздействует на предмет с точно такой же силой, что и предмет на стол. Сила направлена противоположно силе, с которой предмет давит на стол. То есть вверх. Эта сила называется реакцией опоры. Название силы «говорит» реагирует опора. Эта сила возникает всегда, когда есть воздействие на опору. Природа ее возникновения на молекулярном уровне. Предмет как бы деформировал привычное положение и связи молекул (внутри стола), они, в свою очередь, стремятся вернуться в свое первоначальное состояние, «сопротивляются».
Абсолютно любое тело, даже очень легкое (например,карандаш, лежащий на столе), на микроуровне деформирует опору. Поэтому возникает реакция опоры.
Специальной формулы для нахождения этой силы нет. Обозначают ее буквой , но эта сила просто отдельный вид силы упругости, поэтому она может быть обозначена и как
Обозначают ее буквой , но эта сила просто отдельный вид силы упругости, поэтому она может быть обозначена и как
Сила приложена в точке соприкосновения предмета с опорой. Направлена перпендикулярно опоре.
Так как тело представляем в виде материальной точки, силу можно изображать с центра
Сила упругости
Это сила возникает в результате деформации (изменения первоначального состояния вещества). Например, когда растягиваем пружину, мы увеличиваем расстояние между молекулами материала пружины. Когда сжимаем пружину — уменьшаем. Когда перекручиваем или сдвигаем. Во всех этих примерах возникает сила, которая препятствует деформации — сила упругости.
Закон Гука
Сила упругости направлена противоположно деформации.
Так как тело представляем в виде материальной точки, силу можно изображать с центра
При последовательном соединении, например, пружин жесткость рассчитывается по формуле
При параллельном соединении жесткость
Жесткость образца. Модуль Юнга.
Модуль Юнга.
Модуль Юнга характеризует упругие свойства вещества. Это постоянная величина, зависящая только от материала, его физического состояния. Характеризует способность материала сопротивляться деформации растяжения или сжатия. Значение модуля Юнга табличное.
Подробнее о свойствах твердых тел здесь.
Вес тела
Вес тела — это сила, с которой предмет воздействует на опору. Вы скажете, так это же сила тяжести! Путаница происходит в следующем: действительно часто вес тела равен силе тяжести, но это силы совершенно разные. Сила тяжести — сила, которая возникает в результате взаимодействия с Землей. Вес — результат взаимодействия с опорой. Сила тяжести приложена в центре тяжести предмета, вес же — сила, которая приложена на опору (не на предмет)!
Формулы определения веса нет. Обозначается эта силы буквой .
Сила реакции опоры или сила упругости возникает в ответ на воздействие предмета на подвес или опору, поэтому вес тела всегда численно одинаков силе упругости, но имеет противоположное направление.
Сила реакции опоры и вес — силы одной природы, согласно 3 закону Ньютона они равны и противоположно направлены. Вес — это сила, которая действует на опору, а не на тело. Сила тяжести действует на тело.
Вес тела может быть не равен силе тяжести. Может быть как больше, так и меньше, а может быть и такое, что вес равен нулю. Это состояние называется невесомостью. Невесомость — состояние, когда предмет не взаимодействует с опорой, например, состояние полета: сила тяжести есть, а вес равен нулю!
Определить направление ускорения возможно, если определить, куда направлена равнодействующая сила
Обратите внимание, вес — сила, измеряется в Ньютонах. Как верно ответить на вопрос: «Сколько ты весишь»? Мы отвечаем 50 кг, называя не вес, а свою массу! В этом примере, наш вес равен силе тяжести, то есть примерно 500Н!
Перегрузка — отношение веса к силе тяжести
Сила Архимеда
Сила возникает в результате взаимодействия тела с жидкость (газом), при его погружении в жидкость (или газ). Эта сила выталкивает тело из воды (газа). Поэтому направлена вертикально вверх (выталкивает). Определяется по формуле:
Эта сила выталкивает тело из воды (газа). Поэтому направлена вертикально вверх (выталкивает). Определяется по формуле:
В воздухе силой Архимеда пренебрегаем.
Если сила Архимеда равна силе тяжести, тело плавает. Если сила Архимеда больше, то оно поднимается на поверхность жидкости, если меньше — тонет.
Электрические силы
Существуют силы электрического происхождения. Возникают при наличии электрического заряда. Эти силы, такие как сила Кулона, сила Ампера, сила Лоренца, подробно рассмотрены в разделе Электричество.
Схематичное обозначение действующих на тело сил
Часто тело моделируют материальной точкой. Поэтому на схемах различные точки приложения переносят в одну точку — в центр, а тело изображают схематично кругом или прямоугольником.
Для того, чтобы верно обозначить силы, необходимо перечислить все тела, с которыми исследуемое тело взаимодействует. Определить, что происходит в результате взаимодействия с каждым: трение, деформация, притяжение или может быть отталкивание. Определить вид силы, верно обозначить направление. Внимание! Количество сил будет совпадать с числом тел, с которыми происходит взаимодействие.
Определить вид силы, верно обозначить направление. Внимание! Количество сил будет совпадать с числом тел, с которыми происходит взаимодействие.
Главное запомнить
1) Силы и их природа;
2) Направление сил;
3) Уметь обозначить действующие силы
Рассмотрим взаимное притяжение предмета и Земли. Между ними, согласно закону гравитации возникает сила
А сейчас сравним закон гравитации и силу тяжести
Величина ускорения свободного падения зависит от массы Земли и ее радиуса! Таким образом, можно высчитать, с каким ускорением будут падать предметы на Луне или на любой другой планете, используя массу и радиус той планеты.
Расстояние от центра Земли до полюсов меньше, чем до экватора. Поэтому и ускорение свободного падения на экваторе немного меньше, чем на полюсах. Вместе с тем, следует отметить, что основной причиной зависимости ускорения свободного падения от широты местности, является факт вращения Земли вокруг своей оси.
При удалении от поверхности Земли сила земного тяготения и ускорения свободного падения изменяются обратно пропорционально квадрату расстояния до центра Земли.
Урок физики в 7 классе с элементами исследования. «Сила упругости»
МКОУ Первомайская ООШ
Урок физики в 7 классе с элементами исследования.
Учитель: Шапошников С. А.
Тема: Сила упругости. Закон Гука.
Форма учебного занятия: комбинированный урок на основе исследовательской деятельности.
Цели урока: Учащиеся должны:
знать о существовании сил упругости, об условиях их возникновения, о силе реакции опоры; знать закон Гука (определение, формулу), определение деформации, что такое упругая и пластическая деформация;
познакомиться с физической величиной — жесткостью; оценить свои умения применять знания о силе упругости к решению физических задач, усвоить характерные особенности сил упругости, возникающих при упругой деформации тела; научиться применять знания о силе упругости к объяснению и анализу явлений окружающего мира;
уметь приводить примеры деформации тел при взаимодействии, вычислять силу упругости, измерять силу упругости.

Задачи урока
Образовательные:
-Дать знания о величинах, характеризующих упругие свойства тела, представление о причинах возникновения сил упругости, доказать, что между молекулами существует притяжение и отталкивание. Качественный анализ формулы F = кх . Физический смысл коэффициента упругости (словесно, записать). Составить перечень известных вам видов деформации.
Обосновать связь между силами упругости и силами взаимодействия между молекулами. Показать, что взаимодействие между молекулами является неотъемлемым свойством материальных объектов, что эмпирический базис необходим для формирования основных положений теории.
Познакомить учащихся с методами измерения сил упругости, с элементами экспериментального метода определения жесткости пружины. Проконтролировать уровень усвоения закона Гука и показать, что он вытекает из опыта и подтверждается экспериментально.
Расширить и уточнить знания о взаимодействии молекул в твердом теле, о том, что жесткость — одна из основных характеристик твердого тела. Создать научное представление о жесткости как о физической величине (обусловленной характером взаимодействия молекул твердого тела), зависящей от рода материала и геометрии тела.
2. Воспитательные:
Подчеркнуть взаимосвязь силы упругости с деформацией как пример проявления одного из признаков метода диалектического познания явлений, значение моделирования механических свойств твердого тела в познании явлений окружающего мира, ограниченность применения знаний на эмпирическом уровне.
Показать значение опытных фактов и эксперимента в создании модели твердого тела, количественного описания фактов и явлений для изучения свойств твердых тел.
3. Развития мышления:
Проверить уровень самостоятельности мышления учащихся по применению знаний в различных ситуациях. Продолжить работу по формированию умений обобщать опытные данные, анализировать свойства и явления на основе знаний.
Продолжить работу по формированию умений обобщать опытные данные, анализировать свойства и явления на основе знаний.
Формировать умения обобщать известные данные на основе выделения главного, развертывать доказательство на основе данных. Объяснить, почему одна пружина удлинилась на 1 см, а другая — на 2 под действием одной и той же силы (словесно). Объяснить смысл термина «пластическая деформация» (пример).
Использование элементов педагогических технологий:
-исследовательской деятельности;
-работа в малых группах;
-деятельностного подхода.
Демонстрации:
Типы деформации (упругая и пластическая), виды деформации, возникновении силы упругости при деформации тел.
Оборудование:
Демонстрационное – Прибор для демонстрации видов деформации тел, упругая линейка на двух опорах и мешочек с песком, стальная пружина и подобная алюминиевая или медная спираль.
Лабораторное – штативы, динамометры, шкала которых заклеена бумагой, наборы грузов массой по 100 г, измерительные ленты, линейки и листочки с заготовленными таблицами, по числу групп, по одному на группу.
Ход урока.
1. Оргмомент. Ребята, сегодняшний урок физики я предлагаю вам начать с разминки – чтобы настроиться на рабочий лад. Давайте разгадаем вот эти ребусы:
3 2 1 4
У
Д=Г
, ьи.
,,
Т=Н
Щ=Г
У нас получились слова: «Сила упругости. Закон Гука».
Ребята, это и есть тема нашего сегодняшнего урока, предлагаю записать её в рабочую тетрадь.
2. Проверка усвоения изученного материала.
Фронтальная беседа.
— Обратите внимание на слово «Сила», раз мы продолжим изучать силы, нам надо кое-что о силах вспомнить, и сделаем мы это в форме беседы.
— Ребята, мы с вами начали изучать причины изменения скорости тел, и пришли к выводу, что скорости тел изменяются… Кто продолжит мою фразу? (под действием других тел) Что является причиной изменения скорости тел?
— И как же назвали физическую величину, являющуюся мерой действия одного тела на другое? (Сила).
— Как в физике обозначают силу? (F )
— Чем характеризуется сила? Другими словами, от чего зависит действие силы? (Величиной и направлением, т. е. сила – векторная величина, имеет значение и точка приложения силы).
— Как условно изображают силы на чертежах, рисунках? (В виде стрелочки). В какую сторону направляют стрелочку? ( В сторону действия силы).
— А как показать на чертеже величину силы? (Соответствующей ей длиной стрелочки).
— Какую силу приняли за единицу измерения сил? ( 1 Н – это сила, которая за 1 секунду изменяет скорость тела массой 1 кг. на 1 м/с.)
— Что Вы можете сказать о силе притяжения тела к Земле? (Она называется силой тяжести, направлена вертикально вниз и зависит от массы тела, обозначается Fт. )
— Как вычислить величину силы тяжести? ( Fт. = mg , где g= 9,8 Н/кг.)
— Как надо поступить, чтобы определить поведение тела, на которое действует не одна сила, а несколько? (надо сложить силы, или найти их равнодействующую).
— Как находится равнодействующая двух сил, направленных вдоль одной прямой в одну сторону? ( F = F1 + F2 )
— А в противоположные стороны? (Если F1 > F2, то ( F = F1 — F2, и будет направлена в сторону большей силы).
— Что говорят о силах, равных по величине и противоположных по направлению, действующих на одно и то же тело? (Их равнодействующая равна 0, они уравновешивают или компенсируют друг друга).
— Может ли изменить свою скорость тело под действием пары таких сил? ( Нет).
3. Изучение нового материала.
— Мы с вами уже знаем, что на все тела, находящиеся вблизи Земли, действует сила тяжести. Под действием этой силы падают на Землю капли дождя, снежинки, оторвавшиеся от веток листья, подброшенные вверх предметы. Но когда все они достигли какой – то опоры, то останавливаются. Например, тот же снег, лежащий на крыше. А ведь Земля продолжает его к себе притягивать.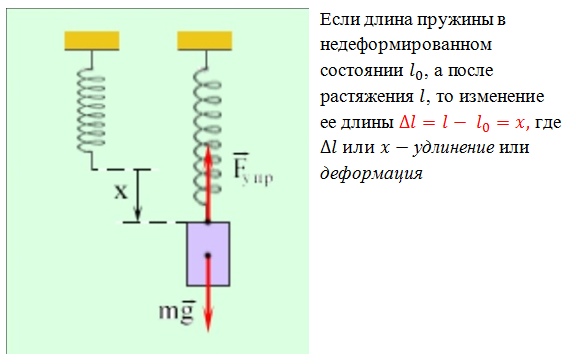 Почему же он не проваливается сквозь крышу, что препятствует его падению? Крыша. Она действует на снег с силой, равной силе тяжести, но направленной в противоположную сторону. Что это за сила?
Почему же он не проваливается сквозь крышу, что препятствует его падению? Крыша. Она действует на снег с силой, равной силе тяжести, но направленной в противоположную сторону. Что это за сила?
Рассмотрим опыт: доска, лежащая на двух подставках. Если на ее середину поместить груз, то под действием силы тяжести груз начнет двигаться, но через некоторое время, прогнув доску, остановится. При этом сила тяжести окажется уравновешенной силой, действующей на гирю со стороны изогнутой доски и направленной вертикально вверх. Эта сила называется силой упругости. Сила упругости возникает при деформации. Деформация — это изменение формы или размеров тела. Одним из видов деформации является изгиб. Чем больше прогибается опора, тем больше сила упругости, действующая со стороны этой опоры на тело. Перед тем как тело (гирю) положили на доску, эта сила отсутствовала. По мере движения гири, которая все сильнее и сильнее прогибала свою опору, возрастала и сила упругости.
 В момент остановки гири сила упругости достигла значения силы тяжести и их равнодействующая стала равной нулю.
В момент остановки гири сила упругости достигла значения силы тяжести и их равнодействующая стала равной нулю.Если на опору поместить достаточно легкий предмет, то ее деформация может оказаться столь незначительной, что никакого изменения формы опоры мы не заметим. Но деформация все равно будет! А вместе с ней будет действовать и сила упругости, препятствующая падению тела, находящегося на данной опоре. В подобных случаях (когда деформация тела незаметна и изменением размеров опоры можно пренебречь) силу упругости называют силой реакции опоры.
Если вместо опоры использовать какой-либо подвес (нить, веревку, проволоку, стержень и т. д.), то прикрепленный к нему предмет также может удерживаться в покое. Сила тяжести и здесь будет уравновешена противоположно направленной силой упругости. Сила упругости при этом возникает из-за того, что подвес под действием прикрепленного к нему груза растягивается. Растяжение еще один вид деформации.
Сила упругости возникает и при сжатии. Именно она заставляет распрямляться сжатую пружину и толкать прикрепленное к ней тело.
Рассмотрим виды деформации на примере вот этого тела:
— Демонстрация видов деформации: (растяжение, сжатие, изгиб, кручение, сдвиг).
4. Исследовательская работа.
1). — А теперь у меня к вам вопрос. Существует ли какая-то зависимость между величиной деформации тела и силой упругости, возникающей при этой деформации? Если зависимость существует, то какая именно? Что вы можете предположить из личного жизненного опыта? Случалось ли вам наклонять ветки в саду, к примеру, чтобы сорвать яблоко?
(выдвигаются гипотезы – формулировку можно записать на доске, приблизительно так: Чем больше деформация тела, тем больше сила упругости, возникающая при этом).
2). Исследования на тему «Изменение длины пружины под действием силы».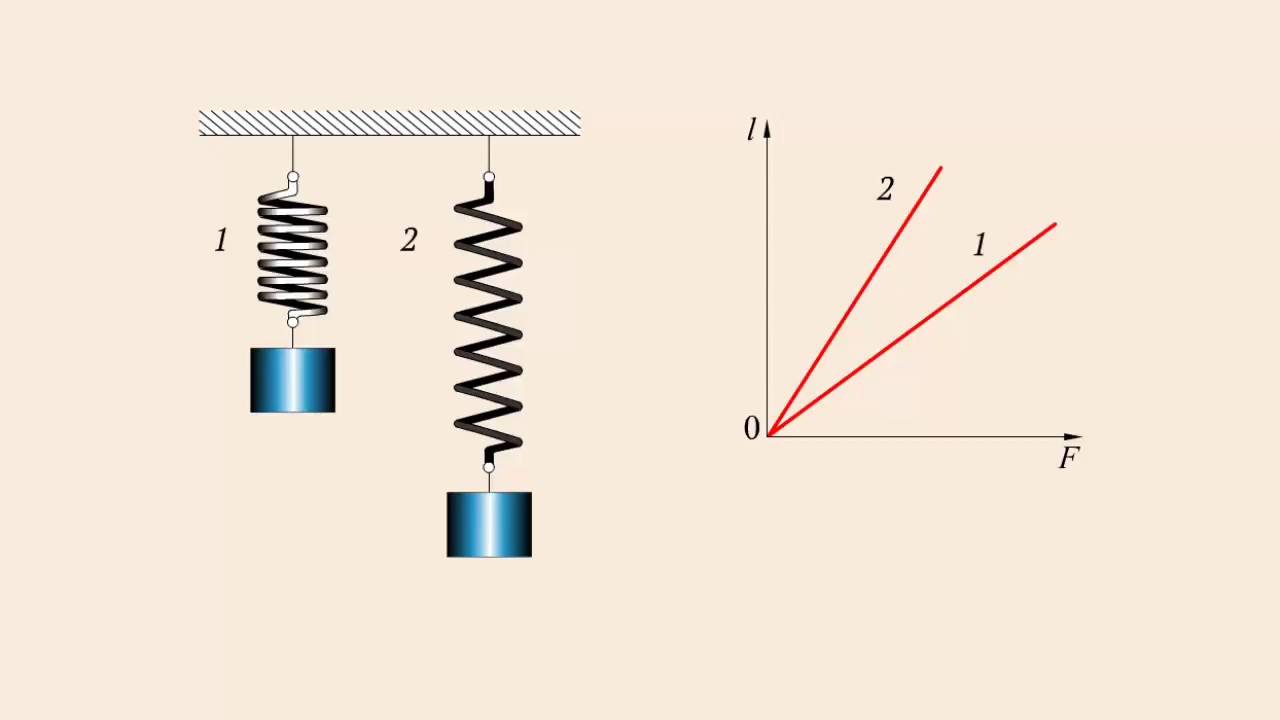
Каждой группе учащихся выданы принадлежности: подвешенная на вертикальной стойке, на которую нанесены деления, пружина со стрелкой, четыре груза одинаковой массы. Ученики также получили карточки, содержащие следующие таблицы для записи результатов исследований.
Задания группам: спланировать самостоятельно порядок проведения исследования зависимости между изменением длины пружины (деформацией) и приложенной к пружине силой, пользуясь предложенным набором предметов.
Провести исследовательский эксперимент, полученные результаты записать в таблицу.
№ опыта
Сила, приложенная к пружине, в Н.
Удлинение пружины
в сантиметрах в метрах
1
2
3
4
Сделать выводы, подтверждающие или опровергающие выдвинутую гипотезу.
Вывод:
3). Отчёт групп о выполнении исследований, сделанные ими выводы об обнаруженной зависимости.
4). Подтвердилась ли наша гипотеза?
На обратной стороне листа с таблицей задания (для страховки):
Заметить положение стрелки ненагруженной пружины.
Подвесить к пружине один из грузов и заметить новое положение стрелки. Найти удлинение пружины.
Подвесить к пружине два груза, отметить положение стрелки и найти новое удлинение.
повторить опыт, подвешивая 3груза, 4 груза.
Данные, полученные в результате исследования, занесите в таблицу.
Сделать вывод о зависимости возникающей при деформации силы упругости пружины от величины деформации (удлинения) пружины.
5. История открытия, границы применимости закона Гука.
Большой вклад в изучение силы упругости внес английский ученый Р. Гук. В 1660 г., когда ему было 25 лет, это случилось 350 лет назад, он установил закон, названный впоследствии его именем. Закон Гуна гласит:
Гук. В 1660 г., когда ему было 25 лет, это случилось 350 лет назад, он установил закон, названный впоследствии его именем. Закон Гуна гласит:
Сила упругости, возникающая при растяжении или сжатии тела, пропорциональна его удлинению.
Если удлинение тела, т. е. изменение его длины, обозначить через х, а силу упругости — через Fупр, то закону Гука можно придать следующую математическую форму:
Fупр = kX,
где k — коэффициент пропорциональности, называемый жесткостью тела. У каждого тела своя жесткость. Чем больше жесткость тела (пружины, проволоки, стержня и т. д.), тем меньше оно изменяет свою длину под действием данной силы.
Единицей жесткости в СИ является ньютон на метр (1 Н/м).
Проделав ряд экспериментов, подтвердивших данный закон, Гук отказался от его публикации. Поэтому в течение долгого времени никто не знал о его открытии. Даже спустя 16 лет, все еще не доверяя своим коллегам, Гук в одной из своих книг привел лишь зашифрованную формулировку (анаграмму) своего закона. Она имела вид
Даже спустя 16 лет, все еще не доверяя своим коллегам, Гук в одной из своих книг привел лишь зашифрованную формулировку (анаграмму) своего закона. Она имела вид
ceiiinosssttuv.
Выждав два года, чтобы конкуренты могли сделать заявки о своих открытиях, он наконец расшифровал свой закон. Анаграмма расшифровывалась так:
ut tensio, sic vis (что в переводе с латинского означает: каково растяжение, такова и сила). «Сила любой пружины,— писал Гук,— пропорциональна ее растяжению».
Гук изучал упругие деформации. Так называют деформации, которые исчезают после прекращения внешнего воздействия. Если, например, пружину несколько растянуть, а затем отпустить, то она снова примет свою первоначальную форму. Но ту же пружину можно растянуть на столько, что, после того как ее отпустят, она так и останется растянутой. Деформации, которые не исчезают после прекращения внешнего воздействия, называют пластическими.
Пластические деформации применяют при лепке из пластилина и глины, при обработке металлов — ковке, штамповке и т. д.
д.
Для пластических деформаций закон Гука не выполняется.
Исторические сведения об использовании упругих свойств некоторых материалов (при наличии времени).
В древние времена упругие свойства некоторых материалов (в частности, такого дерева, как тис) позволили нашим предкам изобрести лук — ручное оружие, предназначенное для метания стрел с помощью силы упругости натянутой тетивы.
Появившись примерно 12 тысяч лет назад, лук просуществовал на протяжении многих веков как основное оружие почти всех племен и народов мира. До изобретения огнестрельного оружия лук являлся самым эффективным боевым средством. Английские лучники могли пускать до 14 стрел в. минуту, что при массовом использовании луков в бою создавало целую тучу стрел. Например, число стрел, выпущенных в битве при Азенкуре (во время Столетней войны), составило примерно 6 миллионов!
Широкое распространение этого грозного оружия в средние века вызвало обоснованный протест со стороны определенных кругов общества. В 1139 г. собравшийся в Риме Лютеранский (церковный) собор запретил применение этого оружия против христиан. Однако борьба за «лучное разоружение» не имела успеха, и лук как боевое оружие продолжал использоваться людьми еще на протяжении пятисот лет.
В 1139 г. собравшийся в Риме Лютеранский (церковный) собор запретил применение этого оружия против христиан. Однако борьба за «лучное разоружение» не имела успеха, и лук как боевое оружие продолжал использоваться людьми еще на протяжении пятисот лет.
Совершенствование конструкции лука и создание самострелов (арбалетов) привело к тому, что выпущенные из них стрелы стали пробивать любые доспехи. Но военная наука не стояла на месте. И в XVII в. лук был вытеснен огнестрельным оружием.
В наше время стрельба из лука является лишь одним из видов спорта.
6. Закрепление изученного материала.
-Что такое жёсткость? Как её вычислить? ( из формулы Fупр = kX)
— Определите жёсткость пружины, использовавшейся в исследовательской работе по полученным уже значениям силы и удлинения.
7. Проверочная тестовая работа (5-6 мин).
Тест
Вопрос
Варианты ответов
Ответ
1. Что такое сила?
а) любое изменение формы тела;
б) мера взаимодействия тел;
в) точного понятия нет.
2. Какой буквой обозначают силу?
а) S;
б) m;
в) F.
3. Какую силу называют силой тяжести?
а) сила, с которой Земля притягивает к себе тела;
б) притяжение всех тел Вселенной друг к другу;
в) физическая величина, характеризующая инертность тела.
4. Как направлена сила тяжести?
а) вертикально вниз;
б) вертикально вверх;
в) вправо.
5. От чего зависит результат действия силы на тело?
а) массы;
б) модуля, направления, точки приложения;
в) объёма, плотности, расстояния.
6. Какую силу называют силой упругости?
а) сила, с которой Земля притягивает к себе тела;
б) притяжение всех тел Вселенной друг к другу;
в) сила, возникающая при деформациях;
7. Какими единицами измеряется жёсткость?
Какими единицами измеряется жёсткость?
а) ньютон на метр (1 Н/м)
б) ньютон на килограмм (Н/кг)
в) килограмм на кубический метр ( 1 кг/м³ )
8. Если на тело действуют две равные по величине и противоположные по направлению силы, то его скорость
а) увеличивается;
б) уменьшается;
в) измениться не может.
8. Домашнее задание
1. Решить задачу № 49 учебника, §14 Сила упругости. Закон Гука.
2. Спроектировать и изготовить простейший прибор для измерения сил.
3. Подготовить сообщение, доклад на тему: «Использование упругих и пластичных материалов».
9. Рефлексия.
Какие виды деформаций мы изучили?
Перечислить особенности действия силы упругости:
когда возникает? (возникает при упругих деформациях)
куда направлена? (направлена противоположно направлению смещения)
к чему приложена? (к телу, которое вызвало деформацию)
при каких деформациях выполняется закон Гука? (при упругих деформациях).

-Урок завершен, надеюсь, что вы с урока уходите с хорошим настроением и большим багажом новых знаний, ведь сегодня вы сами побывали в роле ученых, выдвигали гипотезы, ставили эксперименты, подтверждали свои умозаключения. Вы познакомились с силой упругости, заново открыли закон Гука. Только в слаженной и дружной команде можно добиться таких результатов. Именно такой командой были сегодня вы. Успехов вам на других уроках! До свидания!
Работа, мощность, энергия — Физика — Теория, тесты, формулы и задачи
Оглавление:
Основные теоретические сведения
Механическая работа
К оглавлению…
Энергетические характеристики движения вводятся на основе понятия механической работы или работы силы. Работой, совершаемой постоянной силой F, называется физическая величина, равная произведению модулей силы и перемещения, умноженному на косинус угла между векторами силы F и перемещения S:
Работа является скалярной величиной. Она может быть как положительна (0° ≤ α < 90°), так и отрицательна (90° < α ≤ 180°). При α = 90° работа, совершаемая силой, равна нулю. В системе СИ работа измеряется в джоулях (Дж). Джоуль равен работе, совершаемой силой в 1 ньютон на перемещении 1 метр в направлении действия силы.
Она может быть как положительна (0° ≤ α < 90°), так и отрицательна (90° < α ≤ 180°). При α = 90° работа, совершаемая силой, равна нулю. В системе СИ работа измеряется в джоулях (Дж). Джоуль равен работе, совершаемой силой в 1 ньютон на перемещении 1 метр в направлении действия силы.
Если же сила изменяется с течением времени, то для нахождения работы строят график зависимости силы от перемещения и находят площадь фигуры под графиком – это и есть работа:
Примером силы, модуль которой зависит от координаты (перемещения), может служить сила упругости пружины, подчиняющаяся закону Гука (Fупр = kx).
Мощность
К оглавлению…
Работа силы, совершаемая в единицу времени, называется мощностью. Мощность P (иногда обозначают буквой N) – физическая величина, равная отношению работы A к промежутку времени t, в течение которого совершена эта работа:
По этой формуле рассчитывается средняя мощность, т. е. мощность обобщенно характеризующая процесс. Итак, работу можно выражать и через мощность: A = Pt (если конечно известна мощность и время совершения работы). Единица мощности называется ватт (Вт) или 1 джоуль за 1 секунду. Если движение равномерное, то:
е. мощность обобщенно характеризующая процесс. Итак, работу можно выражать и через мощность: A = Pt (если конечно известна мощность и время совершения работы). Единица мощности называется ватт (Вт) или 1 джоуль за 1 секунду. Если движение равномерное, то:
По этой формуле мы можем рассчитать мгновенную мощность (мощность в данный момент времени), если вместо скорости подставим в формулу значение мгновенной скорости. Как узнать, какую мощность считать? Если в задаче спрашивают мощность в момент времени или в какой-то точке пространства, то считается мгновенная. Если спрашивают про мощность за какой-то промежуток времени или участок пути, то ищите среднюю мощность.
КПД – коэффициент полезного действия, равен отношению полезной работы к затраченной, либо же полезной мощности к затраченной:
Какая работа полезная, а какая затраченная определяется из условия конкретной задачи путем логического рассуждения. К примеру, если подъемный кран совершает работу по подъему груза на некоторую высоту, то полезной будет работа по поднятию груза (так как именно ради нее создан кран), а затраченной – работа, совершенная электродвигателем крана.
К примеру, если подъемный кран совершает работу по подъему груза на некоторую высоту, то полезной будет работа по поднятию груза (так как именно ради нее создан кран), а затраченной – работа, совершенная электродвигателем крана.
Итак, полезная и затраченная мощность не имеют строгого определения, и находятся логическим рассуждением. В каждой задаче мы сами должны определить, что в этой задаче было целью совершения работы (полезная работа или мощность), а что было механизмом или способом совершения всей работы (затраченная мощность или работа).
В общем случае КПД показывает, как эффективно механизм преобразует один вид энергии в другой. Если мощность со временем изменяется, то работу находят как площадь фигуры под графиком зависимости мощности от времени:
Кинетическая энергия
К оглавлению…
Физическая величина, равная половине произведения массы тела на квадрат его скорости, называется кинетической энергией тела (энергией движения):
То есть если автомобиль массой 2000 кг движется со скоростью 10 м/с, то он обладает кинетической энергией равной Ек = 100 кДж и способен совершить работу в 100 кДж. Эта энергия может превратиться в тепловую (при торможении автомобиля нагревается резина колес, дорога и тормозные диски) или может быть потрачена на деформацию автомобиля и тела, с которым автомобиль столкнулся (при аварии). При вычислении кинетической энергии не имеет значения куда движется автомобиль, так как энергия, как и работа, величина скалярная.
Эта энергия может превратиться в тепловую (при торможении автомобиля нагревается резина колес, дорога и тормозные диски) или может быть потрачена на деформацию автомобиля и тела, с которым автомобиль столкнулся (при аварии). При вычислении кинетической энергии не имеет значения куда движется автомобиль, так как энергия, как и работа, величина скалярная.
Тело обладает энергией, если способно совершить работу. Например, движущееся тело обладает кинетической энергией, т.е. энергией движения, и способно совершать работу по деформации тел или придания ускорения телам, с которыми произойдёт столкновение.
Физический смысл кинетической энергии: для того чтобы покоящееся тело массой m стало двигаться со скоростью v необходимо совершить работу равную полученному значению кинетической энергии. Если тело массой m движется со скоростью v, то для его остановки необходимо совершить работу равную его первоначальной кинетической энергии. При торможении кинетическая энергия в основном (кроме случаев соударения, когда энергия идет на деформации) «забирается» силой трения.
При торможении кинетическая энергия в основном (кроме случаев соударения, когда энергия идет на деформации) «забирается» силой трения.
Теорема о кинетической энергии: работа равнодействующей силы равна изменению кинетической энергии тела:
Теорема о кинетической энергии справедлива и в общем случае, когда тело движется под действием изменяющейся силы, направление которой не совпадает с направлением перемещения. Применять данную теорему удобно в задачах на разгон и торможение тела.
Потенциальная энергия
К оглавлению…
Наряду с кинетической энергией или энергией движения в физике важную роль играет понятие потенциальной энергии или энергии взаимодействия тел.
Потенциальная энергия определяется взаимным положением тел (например, положением тела относительно поверхности Земли). Понятие потенциальной энергии можно ввести только для сил, работа которых не зависит от траектории движения тела и определяется только начальным и конечным положениями (так называемые консервативные силы). Работа таких сил на замкнутой траектории равна нулю. Таким свойством обладают сила тяжести и сила упругости. Для этих сил можно ввести понятие потенциальной энергии.
Работа таких сил на замкнутой траектории равна нулю. Таким свойством обладают сила тяжести и сила упругости. Для этих сил можно ввести понятие потенциальной энергии.
Потенциальная энергия тела в поле силы тяжести Земли рассчитывается по формуле:
Физический смысл потенциальной энергии тела: потенциальная энергия равна работе, которую совершает сила тяжести при опускании тела на нулевой уровень (h – расстояние от центра тяжести тела до нулевого уровня). Если тело обладает потенциальной энергией, значит оно способно совершить работу при падении этого тела с высоты h до нулевого уровня. Работа силы тяжести равна изменению потенциальной энергии тела, взятому с противоположным знаком:
Часто в задачах на энергию приходится находить работу по поднятию (переворачиванию, доставанию из ямы) тела. Во всех этих случаях нужно рассматривать перемещение не самого тела, а только его центра тяжести.
Потенциальная энергия Ep зависит от выбора нулевого уровня, то есть от выбора начала координат оси OY. В каждой задаче нулевой уровень выбирается из соображения удобства. Физический смысл имеет не сама потенциальная энергия, а ее изменение при перемещении тела из одного положения в другое. Это изменение не зависит от выбора нулевого уровня.
В каждой задаче нулевой уровень выбирается из соображения удобства. Физический смысл имеет не сама потенциальная энергия, а ее изменение при перемещении тела из одного положения в другое. Это изменение не зависит от выбора нулевого уровня.
Потенциальная энергия растянутой пружины рассчитывается по формуле:
где: k – жесткость пружины. Растянутая (или сжатая) пружина способна привести в движение прикрепленное к ней тело, то есть сообщить этому телу кинетическую энергию. Следовательно, такая пружина обладает запасом энергии. Растяжение или сжатие х надо рассчитывать от недеформированного состояния тела.
Потенциальная энергия упруго деформированного тела равна работе силы упругости при переходе из данного состояния в состояние с нулевой деформацией. Если в начальном состоянии пружина уже была деформирована, а ее удлинение было равно x1, тогда при переходе в новое состояние с удлинением x2 сила упругости совершит работу, равную изменению потенциальной энергии, взятому с противоположным знаком (так как сила упругости всегда направлена против деформации тела):
Потенциальная энергия при упругой деформации – это энергия взаимодействия отдельных частей тела между собой силами упругости.
Работа силы трения зависит от пройденного пути (такой вид сил, чья работа зависит от траектории и пройденного пути называется: диссипативные силы). Понятие потенциальной энергии для силы трения вводить нельзя.
Коэффициент полезного действия
К оглавлению…
Коэффициент полезного действия (КПД) – характеристика эффективности системы (устройства, машины) в отношении преобразования или передачи энергии. Он определяется отношением полезно использованной энергии к суммарному количеству энергии, полученному системой (формула уже приведена выше).
КПД можно рассчитывать как через работу, так и через мощность. Полезная и затраченная работа (мощность) всегда определяются путем простых логических рассуждений.
В электрических двигателях КПД – отношение совершаемой (полезной) механической работы к электрической энергии, получаемой от источника. В тепловых двигателях – отношение полезной механической работы к затрачиваемому количеству теплоты. В электрических трансформаторах – отношение электромагнитной энергии, получаемой во вторичной обмотке, к энергии, потребляемой первичной обмоткой.
В электрических трансформаторах – отношение электромагнитной энергии, получаемой во вторичной обмотке, к энергии, потребляемой первичной обмоткой.
В силу своей общности понятие КПД позволяет сравнивать и оценивать с единой точки зрения такие различные системы, как атомные реакторы, электрические генераторы и двигатели, теплоэнергетические установки, полупроводниковые приборы, биологические объекты и т.д.
Из–за неизбежных потерь энергии на трение, на нагревание окружающих тел и т.п. КПД всегда меньше единицы. Соответственно этому КПД выражается в долях затрачиваемой энергии, то есть в виде правильной дроби или в процентах, и является безразмерной величиной. КПД характеризует как эффективно работает машина или механизм. КПД тепловых электростанций достигает 35–40%, двигателей внутреннего сгорания с наддувом и предварительным охлаждением – 40–50%, динамомашин и генераторов большой мощности – 95%, трансформаторов – 98%.
Задачу, в которой нужно найти КПД или он известен, надо начать с логического рассуждения – какая работа является полезной, а какая затраченной.
Закон сохранения механической энергии
К оглавлению…
Полной механической энергией называется сумма кинетической энергии (т.е. энергии движения) и потенциальной (т.е. энергии взаимодействия тел силами тяготения и упругости):
Если механическая энергия не переходит в другие формы, например, во внутреннюю (тепловую) энергию, то сумма кинетической и потенциальной энергии остаётся неизменной. Если же механическая энергия переходит в тепловую, то изменение механической энергии равно работе силы трения или потерям энергии, или количеству выделившегося тепла и так далее, другими словами изменение полной механической энергии равно работе внешних сил:
Сумма кинетической и потенциальной энергии тел, составляющих замкнутую систему (т.е. такую в которой не действует внешних сил, и их работа соответственно равна нолю) и взаимодействующих между собой силами тяготения и силами упругости, остается неизменной:
Это утверждение выражает закон сохранения энергии (ЗСЭ) в механических процессах. Он является следствием законов Ньютона. Закон сохранения механической энергии выполняется только тогда, когда тела в замкнутой системе взаимодействуют между собой силами упругости и тяготения. Во всех задачах на закон сохранения энергии всегда будет как минимум два состояния системы тел. Закон гласит, что суммарная энергия первого состояния будет равна суммарной энергии второго состояния.
Он является следствием законов Ньютона. Закон сохранения механической энергии выполняется только тогда, когда тела в замкнутой системе взаимодействуют между собой силами упругости и тяготения. Во всех задачах на закон сохранения энергии всегда будет как минимум два состояния системы тел. Закон гласит, что суммарная энергия первого состояния будет равна суммарной энергии второго состояния.
Алгоритм решения задач на закон сохранения энергии:
- Найти точки начального и конечного положения тела.
- Записать какой или какими энергиями обладает тело в данных точках.
- Приравнять начальную и конечную энергию тела.
- Добавить другие необходимые уравнения из предыдущих тем по физике.
- Решить полученное уравнение или систему уравнений математическими методами.
Важно отметить, что закон сохранения механической энергии позволил получить связь между координатами и скоростями тела в двух разных точках траектории без анализа закона движения тела во всех промежуточных точках. Применение закона сохранения механической энергии может в значительной степени упростить решение многих задач.
Применение закона сохранения механической энергии может в значительной степени упростить решение многих задач.
В реальных условиях практически всегда на движущиеся тела наряду с силами тяготения, силами упругости и другими силами действуют силы трения или силы сопротивления среды. Работа силы трения зависит от длины пути.
Если между телами, составляющими замкнутую систему, действуют силы трения, то механическая энергия не сохраняется. Часть механической энергии превращается во внутреннюю энергию тел (нагревание). Таким образом энергия в целом (т.е. не только механическая) в любом случае сохраняется.
При любых физических взаимодействиях энергия не возникает и не исчезает. Она лишь превращается из одной формы в другую. Этот экспериментально установленный факт выражает фундаментальный закон природы – закон сохранения и превращения энергии.
Одним из следствий закона сохранения и превращения энергии является утверждение о невозможности создания «вечного двигателя» (perpetuum mobile) – машины, которая могла бы неопределенно долго совершать работу, не расходуя при этом энергии.
Разные задачи на работу
К оглавлению…
Если в задаче требуется найти механическую работу, то сначала выберите способ её нахождения:
- Работу можно найти по формуле: A = FS∙cosα. Найдите силу, совершающую работу, и величину перемещения тела под действием этой силы в выбранной системе отсчёта. Обратите внимание, что угол должен быть выбран между векторами силы и перемещения.
- Работу внешней силы можно найти, как разность механической энергии в конечной и начальной ситуациях. Механическая энергия равна сумме кинетической и потенциальной энергий тела.
- Работу по подъёму тела с постоянной скоростью можно найти по формуле: A = mgh, где h – высота, на которую поднимается центр тяжести тела.
- Работу можно найти как произведение мощности на время, т.е. по формуле: A = Pt.
- Работу можно найти, как площадь фигуры под графиком зависимости силы от перемещения или мощности от времени.

Закон сохранения энергии и динамика вращательного движения
К оглавлению…
Задачи этой темы являются достаточно сложными математически, но при знании подхода решаются по совершенно стандартному алгоритму. Во всех задачах Вам придется рассматривать вращение тела в вертикальной плоскости. Решение будет сводиться к следующей последовательности действий:
- Надо определить интересующую Вас точку (ту точку, в которой необходимо определить скорость тела, силу натяжения нити, вес и так далее).
- Записать в этой точке второй закон Ньютона, учитывая, что тело вращается, то есть у него есть центростремительное ускорение.
- Записать закон сохранения механической энергии так, чтобы в нем присутствовала скорость тела в той самой интересной точке, а также характеристики состояния тела в каком-нибудь состоянии про которое что-то известно.
- В зависимости от условия выразить скорость в квадрате из одного уравнения и подставить в другое.
- Провести остальные необходимые математические операции для получения окончательного результата.

При решении задач надо помнить, что:
- Условие прохождения верхней точки при вращении на нити с минимальной скоростью – сила реакции опоры N в верхней точке равна 0. Такое же условие выполняется при прохождении верхней точки мертвой петли.
- При вращении на стержне условие прохождения всей окружности: минимальная скорость в верхней точке равна 0.
- Условие отрыва тела от поверхности сферы – сила реакции опоры в точке отрыва равна нулю.
Неупругие соударения
К оглавлению…
Закон сохранения механической энергии и закон сохранения импульса позволяют находить решения механических задач в тех случаях, когда неизвестны действующие силы. Примером такого рода задач является ударное взаимодействие тел.
Ударом (или столкновением) принято называть кратковременное взаимодействие тел, в результате которого их скорости испытывают значительные изменения. Во время столкновения тел между ними действуют кратковременные ударные силы, величина которых, как правило, неизвестна. Поэтому нельзя рассматривать ударное взаимодействие непосредственно с помощью законов Ньютона. Применение законов сохранения энергии и импульса во многих случаях позволяет исключить из рассмотрения сам процесс столкновения и получить связь между скоростями тел до и после столкновения, минуя все промежуточные значения этих величин.
Во время столкновения тел между ними действуют кратковременные ударные силы, величина которых, как правило, неизвестна. Поэтому нельзя рассматривать ударное взаимодействие непосредственно с помощью законов Ньютона. Применение законов сохранения энергии и импульса во многих случаях позволяет исключить из рассмотрения сам процесс столкновения и получить связь между скоростями тел до и после столкновения, минуя все промежуточные значения этих величин.
С ударным взаимодействием тел нередко приходится иметь дело в обыденной жизни, в технике и в физике (особенно в физике атома и элементарных частиц). В механике часто используются две модели ударного взаимодействия – абсолютно упругий и абсолютно неупругий удары.
Абсолютно неупругим ударом называют такое ударное взаимодействие, при котором тела соединяются (слипаются) друг с другом и движутся дальше как одно тело.
При абсолютно неупругом ударе механическая энергия не сохраняется. Она частично или полностью переходит во внутреннюю энергию тел (нагревание). Для описания любых ударов Вам нужно записать и закон сохранения импульса, и закон сохранения механической энергии с учетом выделяющейся теплоты (предварительно крайне желательно сделать рисунок).
Для описания любых ударов Вам нужно записать и закон сохранения импульса, и закон сохранения механической энергии с учетом выделяющейся теплоты (предварительно крайне желательно сделать рисунок).
Абсолютно упругий удар
К оглавлению…
Абсолютно упругим ударом называется столкновение, при котором сохраняется механическая энергия системы тел. Во многих случаях столкновения атомов, молекул и элементарных частиц подчиняются законам абсолютно упругого удара. При абсолютно упругом ударе наряду с законом сохранения импульса выполняется закон сохранения механической энергии. Простым примером абсолютно упругого столкновения может быть центральный удар двух бильярдных шаров, один из которых до столкновения находился в состоянии покоя.
Центральным ударом шаров называют соударение, при котором скорости шаров до и после удара направлены по линии центров. Таким образом, пользуясь законами сохранения механической энергии и импульса, можно определить скорости шаров после столкновения, если известны их скорости до столкновения. Центральный удар очень редко реализуется на практике, особенно если речь идет о столкновениях атомов или молекул. При нецентральном упругом соударении скорости частиц (шаров) до и после столкновения не направлены по одной прямой.
Центральный удар очень редко реализуется на практике, особенно если речь идет о столкновениях атомов или молекул. При нецентральном упругом соударении скорости частиц (шаров) до и после столкновения не направлены по одной прямой.
Частным случаем нецентрального упругого удара может служить соударения двух бильярдных шаров одинаковой массы, один из которых до соударения был неподвижен, а скорость второго была направлена не по линии центров шаров. В этом случае векторы скоростей шаров после упругого соударения всегда направлены перпендикулярно друг к другу.
Законы сохранения. Сложные задачи
К оглавлению…
Несколько тел
В некоторых задачах на закон сохранения энергии тросы с помощью которых перемещаются некие объекты могут иметь массу (т.е. не быть невесомыми, как Вы могли уже привыкнуть). В этом случае работу по перемещению таких тросов (а именно их центров тяжести) также нужно учитывать.
Если два тела, соединённые невесомым стержнем, вращаются в вертикальной плоскости, то:
- выбирают нулевой уровень для расчёта потенциальной энергии, например на уровне оси вращения или на уровне самой нижней точки нахождения одного из грузов и обязательно делают чертёж;
- записывают закон сохранения механической энергии, в котором в левой части записывают сумму кинетической и потенциальной энергии обоих тел в начальной ситуации, а в правой части записывают сумму кинетической и потенциальной энергии обоих тел в конечной ситуации;
- учитывают, что угловые скорости тел одинаковы, тогда линейные скорости тел пропорциональны радиусам вращения;
- при необходимости записывают второй закон Ньютона для каждого из тел в отдельности.

Разрыв снаряда
В случае разрыва снаряда выделяется энергия взрывчатых веществ. Чтобы найти эту энергию надо от суммы механических энергий осколков после взрыва отнять механическую энергию снаряда до взрыва. Также будем использовать закон сохранения импульса, записанный, в виде теоремы косинусов (векторный метод) или в виде проекций на выбранные оси.
Столкновения с тяжёлой плитой
Пусть навстречу тяжёлой плите, которая движется со скоростью v, движется лёгкий шарик массой m со скоростью uн. Так как импульс шарика много меньше импульса плиты, то после удара скорость плиты не изменится, и она будет продолжать движение с той же скоростью и в том же направлении. В результате упругого удара, шарик отлетит от плиты. Здесь важно понять, что не поменяется скорость шарика относительно плиты. В таком случае, для конечной скорости шарика получим:
Таким образом, скорость шарика после удара увеличивается на удвоенную скорость стены. Аналогичное рассуждение для случая, когда до удара шарик и плита двигались в одном направлении, приводит к результату согласно которому скорость шарика уменьшается на удвоенную скорость стены:
Аналогичное рассуждение для случая, когда до удара шарик и плита двигались в одном направлении, приводит к результату согласно которому скорость шарика уменьшается на удвоенную скорость стены:
Задачи о максимальных и минимальных значениях энергии сталкивающихся шаров
В задачах такого типа главное понять, что потенциальная энергия упругой деформации шаров максимальна, если кинетическая энергия их движения минимальна – это следует из закона сохранения механической энергии. Сумма кинетических энергий шаров минимальна в тот момент, когда скорости шаров будут одинаковы по величине и направлены в одном направлении. В этот момент относительная скорость шаров равна нулю, а деформация и связанная с ней потенциальная энергия максимальна.
Сила упругости. Закон Гука
Тема. Сила упругости. Закон Гука.
Цель урока: Задачи урока:обучающие: сформировать знания о деформации, силе упругости; вывести закон Гука; сформировать способности применять закон Гука при решении задач;
развивающие: продолжить формирование у учащихся представлений о разнообразии сил в природе, развивать умение наблюдать и объяснять физические явления; проводить эксперимент, делать выводы;
воспитательные: продолжить формирование навыков коллективной и самостоятельной работы.

ХОД УРОКА
I.Проверка домашнего задания. Вопросы для проверки усвоения материала: 1.Почему камень, выпущенный из рук , падает на землю? 2.Каков вид траектории мяча, брошенного в горизонтальном направлении? 3.Какова причина падения тел на землю? 4.Какую силу называют силой тяжести? Как обозначают эту силу? Как она направлена? 5.Как зависит сила тяжести от массы тела?Тест:
1. Что такое сила?
а) любое изменение формы тела;
б) мера взаимодействия тел;
в) точного понятия нет.
2. Какой буквой обозначают силу?
а) S;
б) m;
в) F.
2.Единица измерения силы?
a) килограмм;
б) Ньютон;
в) секунда.
3. Какую силу называют силой тяжести?
а) сила, с которой Земля притягивает к себе тела;
б) притяжение всех тел Вселенной друг к другу;
в) физическая величина, характеризующая инертность тела.
4. Как направлена сила тяжести?
а) вертикально вниз;
б) вертикально вверх;
в) вправо.
5. От чего зависит результат действия силы на тело?
а) массы;
б) модуля, направления, точки приложения;
в) объёма, плотности, расстояния.
Перед тем как сформулировать определение силы упругости, давайте проведем опыт
На середину горизонтально расположенной доски поставим гирю.
Под действием силы тяжести гиря двигается вниз и прогнёт доску, т.е. доска деформируется.
Вывод: на гирю, кроме силы тяжести, направленной вертикально вниз, действует другая сила.
Эта сила, направленная вертикально вверх, уравновешивает силу тяжести.
Эту силу называют силой упругости.
Сила, возникающая в теле в результате его деформации и стремящаяся вернуть тело в исходное положение, называют силой упругости
Силу упругости обозначают: Fупр
Сила упругости возникает при деформации тел.
 На рисунке 2 Вы можете просмотреть виды деформации.
На рисунке 2 Вы можете просмотреть виды деформации.Рис. 2. Деформация
В свою очередь упругая деформация делится на следующие виды (Рисунок 3)
Рис. 3. Виды упругих деформаций
Выясним, в чем же причина возникновения силы упругости (Рисунок 4):
• Как называются частицы, из которых состоят вещества?
• Какие взаимодействия существуют между молекулами?
• На каком расстоянии действует сила притяжения?
• На каком расстоянии действует сила отталкивания?
Рис. 4. Причины возникновения силы упругости
Причиной возникновения сил упругости является взаимодействие молекул тела. На малых расстояниях молекулы отталкиваются, а на больших – притягиваются. В недеформированном теле молекулы находятся как раз на таком расстоянии, при котором силы притяжения, либо силы отталкивания уравновешиваются. Когда мы растягиваем или сжимаем тело, расстояния между молекулами изменяются, поэтому начинают преобладать либо силы притяжения, либо силы отталкивания. В результате и возникает сила упругости, которая всегда направлена так, чтобы уменьшить величину деформации тела.
В результате и возникает сила упругости, которая всегда направлена так, чтобы уменьшить величину деформации тела.
Рис. 5. Сила упругости
Сила упругости – это электромагнитная сила, возникающая при деформации тела и направленная в сторону, противоположную направлению смещения частиц тела при деформации. Приложена к деформируемому телу.
Рис. 6. Если тело лежит на опоре, то сила упругости обозначается N – сила реакции опоры.
Рис. 7. чем больше сила, тем больше удлиняется пружина.
Закон Гука Английский ученый Роберт Гук в 1660 году установил закон, названный его именем.
Если к пружине динамометра подвешивать разные грузы, то можно заметить, что растяжение становится тем больше, чем больше масса, а значит и сила тяжести грузов.
Рис. 8. Роберт Гук
На рисунке 9 все вместе внимательно прочитаем и запишем в тетрадь Закон Гука
Рис. 9. Закон Гука
Формулу для вычисления силы упругости легко запомнить с помощью стихотворения:
Закон Гука
Для каждой ситуации
В упругой деформации
Закон везде один: Все силы , как и водится ,
В пропорции находятся
К увеличенью длин.
А если при решении У длин есть уменьшение
Закон и тут закон :
Пропорции упрямые
Прямые ( те же самые),
Но знак у них сменен.
Ну что это за мука :
Закон запомнить Гука!
Но мы пойдем на риск .
Напишем слева силу,
А справа , чтобы было
Знак «минус», « k» и « x»
F=-kx.
Применение силы упругости
На рисунках Вы можете просмотреть, где же применяется сила упругости. Объясните, по каждому рисунку почему именно здесь применяется сила упругости?
Рис. 10 Применение силы упругости
Рис. 11. Применение силы упругости
Рис. 12. Применение силы упругости
Приведите свои примеры применения силы упругости
Сила, возникающая в теле в результате его деформации и стремящаяся вернуть тело в исходное положение, называют силой упругости
Если исчезнет деформации тел, то исчезнет и сила упругости.
Виды деформации: Кручение; сдвиг; изгиб; растяжение; сжатие
Закон Гука
Изменение длины тела при растяжении (или сжатии) прямо пропорционально модулю силы упругости.
Fупр. = k Δl
Δl- удлинение тела
k – коэффициент пропорциональности, который называется жёсткостью.
Жёсткость тела зависит от формы и размеров тела, а также от материала, из которого оно изготовлено.
Деформация, при которой тело восстанавливает свою форму после снятия нагрузки, называют упругой.
Деформации, которые не исчезают после прекращения внешнего воздействия, называют пластическими.
Для пластических деформаций закон Гука не выполняется.

Что такое деформация?
Когда это явление происходит?
Какие бывают деформации?
Какой физической величиной характеризуют деформацию?
Если деформированное тело, например растянутая пружина, остается в покое, то о чём это говорит? Как в этом случае соотносятся между собой внешняя сила и сила упругости?
О чём говорит закон Гука?
Под действием какой силы пружина, имеющая коэффициент жесткости 1кН/м, сжалась на 4 см?
Определите удлинение пружины, если на нее действует сила 10 Н, а коэффициент жесткости пружины 500 Н/м.
Чему равен коэффициент жесткости стержня, если под действием груза 1кН он удлинился на 1 мм?

Лабораторная работа
Определение жесткости пружины.Цель работы: | проверить справедливость закона Гука для пружины динамометра и измерить коэффициент жесткости этой пружины. |
Оборудование: | динамометр с заклеенной шкалой, набор грузов известной массы (по 100 г), линейка с миллиметровыми делениями. |
Описание работы. | Согласно закону Гука, модуль F силы упругости и модуль х удлинения пружины связаны соотношением F =- kx. Измерив F и х, можно найти коэффициент жесткости k по формуле |
ХОД РАБОТЫ:
Подвешивая различное число грузов к пружине динамометра (от 1-го до 3-х), вычислите для каждого случая соответствующее значение F = mg, а также измерьте соответствующее удлинение пружины х.
Результаты измерений и вычислений запишите в таблицу.

№ опыта | m, кг F | , H | х, м k, |
1 | 0,1 |
|
|
2 | 0,2 |
|
|
3 | 0,3 |
|
|
|
|
Начертите оси координат х и F, выберите удобный масштаб и нанесите полученные экспериментальные точки.
Оцените (качественно) справедливость закона Гука для данной пружины: находятся ли экспериментальные точки вблизи одной прямой, проходящей через начало координат.
Запишите сделанный вами вывод.
Сделайте рисунок
Решите задачи:
Жесткость пружины 5000 Н\м.
С какой силой будет действовать пружина , если она удлинилась на 8 см7Пружина под действием силы 200 Н растянулась на 10 см. Определите жесткость пружины.
На какую длину растянется пружина под действием силы 300 Н , с жесткостью пружины 40 Н\м?
 С какой силой будет действовать пружина , если она удлинилась на 8 см7
С какой силой будет действовать пружина , если она удлинилась на 8 см7Перышкин А.В.,А.А Пинский ,В.Г. Разумовский Физика. Учебник для общеобразовательных учебных заведений 7 класс. – М., ОАО «Московские учебники», 2010
Сила упругости — online presentation
Закон Гука:Сила упругости, возникающая при деформации тела,
пропорциональна его удлинению и направлена
противоположно направлению перемещения частиц
тела при деформации.

Fупр k l
l l l0
k
!
— удлинение тела;
Fупр
-коэффициент
пропорциональности, называемый
жесткостью
тела.
Единица
измерения жесткости – Н/м.
l
При деформации растяжения Δl>0, при деформации сжатия Δl
Поэтому, если спроектировать закон Гука на ось Х, то мы получим
Fупр = -кх, где х — проекция ΔL на ось X.
4
ДЕФОРМАЦИЯ
упругая
пластическая
Закон Гука применим только для упругой деформации!
Сила упругости
Совокупность всех молекулярных
сил взаимодействия, действующих
на тело, образует силу упругости
Сила упругости стремится вернуть
тело в исходное положение.
Обозначается она так же буквой F с
индексом Fупр
Характеристики силы упругости:
1.
2.
3.
Сила упругости приложена к телу
( например, сила упругости,
возникшая в пружине, действует
на груз
Сила
упругости
всегда
направлена противоположно той
силе, которая вызвала изменение
формы или размеров тела.

Сила
упругости
имеет
электромагнитную природу.
8
От чего зависит жесткость?
K
Площади поперечного
сечения
длины
материала
! Интересно знать
Как ни удивительно, но кость по своей прочности уступает только
твёрдым сортам стали, и оказывается гораздо прочнее, тел из
гранита и бетона, ставших образцами прочности!
Если сравнить крепость человеческого волоса с проволокой такого
же диаметра, то волос будет крепче чем свинцовая, цинковая,
алюминиевая, платиновая и медная проволока. Только железо,
бронза и сталь крепче человеческого волоса. Женская коса может
удержать груз до 20 т.
Паутина в три раза крепче стальной проволоки такого же диаметра.
9
Пример решение задач:
1.
Какова сила упругости, возникающая в пружине,
жесткостью 50 Н/м, если она растянулась на 5см?
Дано:
СИ
Решение:
k = 50 Н/м
Δl =5см
0, 05м
=?
Ответ:
= 2,5 Н
На рисунке представлены
графики зависимости модулей
сил упругости от деформации
для двух пружин.

Чему равно отношение жесткости
первой пружины к жесткости
второй пружины?
Дано:
l 2см
F1 10Н
F2 20Н
k1
?
k2
СИ
0,02м
Решение:
Записываем закон Гука для каждой пружины
Fупр1 k1 l
1
2
Fупр1
k2
Fупр2
Из закона получаем, что
,а
l
l
Подставляем численные значения
10 Н
Н , а k 20 Н 1000 Н
12
k
500
k1
1
0,02 м
Тогда
Ответ:
Fупр 2 k 2 l
м
0,02 м
м
k1
500 Н
1
k2
1000 Н
2
11
Чему равна жесткость пружины, если под действие силы 2Н, она растянулась
на 4см?
Задание по выбору.
Задача на «3»:
Какова сила упругости, возникающая в пружине, жесткостью 100 Н/м,
если она растянулась на 2,5см?
Задача на «4»:
Сила 12Н сжимает пружину на 7,5 см. какой величины силу нужно
приложить, чтобы сжать эту пружину?
Задача на «5»:
Пружина длиной 3см при нагрузке 25Н удлинилась на 2мм.

Определить длину пружины при нагрузке 100Н.
Что указывает на жесткость пружины? — Mvorganizing.org
Что указывает на жесткость пружины?
Буква k представляет «жесткость пружины», число, которое по сути говорит нам, насколько «жестка» пружина. Если у вас большое значение k, это означает, что для его растяжения на определенную длину требуется больше силы, чем для растяжения менее жесткой пружины той же длины.
Какова эффективная масса пружины?
Эффективная масса пружины в системе пружина-масса при использовании идеальной пружины с равномерной линейной плотностью составляет 1/3 массы пружины и не зависит от направления системы пружина-масса (т.е., горизонтальная, вертикальная и наклонная системы имеют одинаковую эффективную массу).
Что делать, если у пружины есть масса?
Масса, подвешенная на пружине, имеющей свою массу, становится частью более сложной системы. Если M колеблется, мы наблюдаем, что во время движения каждая секция пружины движется со своей скоростью, отличной от скорости подвешенной массы. Затем нам нужно определить движение тела M и пружины.
Затем нам нужно определить движение тела M и пружины.
Почему эффективная масса пружины?
Поскольку кинетическая энергия зависит от квадрата скорости, оказывается, что эффективная масса на конце пружины равна м / 3, а не м / 2.Как показывают эти два примера, эффективная масса — это свойство не только самой пружины, но и всей системы и того, как система движется.
Как масса влияет на пружину?
Для системы масса-пружина масса все еще влияет на инерцию, но не вызывает силы. Пружина (и ее жесткость пружины) полностью отвечает за силу. Таким образом, масса влияет только на сопротивление ускорениям, и вы замечаете, что чем массивнее объект, тем медленнее он покачивается взад и вперед.
Где теряется энергия в источнике?
В идеальной пружине не теряется энергия; энергия просто передается вперед и назад между кинетической энергией массы на пружине и потенциальной энергией пружины (также может быть задействован гравитационный PE).
Как определить степень сжатия пружины?
Расчет величины постоянной силы, необходимой для сжатия спиральной пружины сжатия до высоты нагружения, вычисляется путем умножения силы на расстояние, которое, как ожидается, пройдет спиральная пружина сжатия. Единица измерения постоянной силы — фунт-сила / дюйм, что означает фунты силы на дюйм.
Единица измерения постоянной силы — фунт-сила / дюйм, что означает фунты силы на дюйм.
Как вы рассчитываете, как далеко может растянуться пружина?
Обоснование: Из приведенных данных можно найти жесткость пружины для массы 4 кг. Затем мы используем x = F / k, чтобы найти смещение массы 1,5 кг. Работа, которую необходимо выполнить, чтобы растянуть пружину на расстояние x от ее положения равновесия, составляет W = ½kx2.
Сколько работы выполняется при сжатии пружины?
Аппроксимация означает, что мы вычисляем работу, выполненную при сжатии пружины, по ступенчатой голубой области на графике, а не по области под темно-синей линией.Общая проделанная работа составляет (1/2) k x2, что в данном случае совпадает с площадью ступенек. Вырабатывает до 0,5 Дж энергии.
Что такое силовая постоянная?
В физике силовая постоянная — это еще один термин для жесткости пружины, определенный законом Гука. Точнее, это константа пропорциональности. Константа прочности k связана с жесткостью (или жесткостью) системы, чем больше постоянная силы, тем больше восстанавливаемая сила и тем жестче система.
Константа прочности k связана с жесткостью (или жесткостью) системы, чем больше постоянная силы, тем больше восстанавливаемая сила и тем жестче система.
Что такое силовая постоянная в SHM?
В этом случае сила может быть рассчитана как F = -kx, где F — возвращающая сила, k — силовая постоянная, а x — смещение.Движение массы на пружине можно описать как простое гармоническое движение (SHM): колебательное движение, которое следует закону Гука.
Трение — это постоянная сила?
где L — нагрузка (нормальная сила), а μ — постоянная величина, называемая коэффициентом трения. Это обнаруживает множество экспериментально измеренных графиков зависимости μ от скорости скольжения, и вы увидите, что μ действительно зависит от скорости, а не является постоянной величиной. Трение — это возникающее свойство.
Что такое постоянная силы пружины?
Постоянная пропорциональности k называется жесткостью пружины.Это мера жесткости пружины. Когда пружина растягивается или сжимается, так что ее длина изменяется на величину x от ее равновесной длины, тогда она прикладывает силу F = -kx в направлении к ее положению равновесия.
Что означает низкая жесткость пружины?
Более высокая жесткость пружины означает более жесткую пружину, которую труднее растянуть (потому что при заданном смещении x результирующая сила F будет выше), в то время как более свободная пружина, которую легче растянуть, будет иметь более низкую жесткость пружины.
Почему короткие пружины жестче?
Когда 10-витковая пружина разрезана пополам, жесткость каждой результирующей 5-витковой пружины составляет 2k. В общем, жесткость пружины обратно пропорциональна количеству витков в пружине, поэтому более короткие пружины являются более жесткими при прочих равных условиях.
Более длинные пружины жестче?
, чем длиннее, тем больше витков и более толстый материал для компенсации. если вы покупаете пружины 2 дюйма и пружины 2,5 дюйма с одинаковым рейтингом, то 2.5 дюймов будет изготовлен из более жесткого материала, чтобы сохранить желаемую жесткость.
Более жесткие пружины оказывают большее усилие?
Менее жесткий объект легче растянуть или сжать. Сравнивая два упругих объекта, более упругая сила пружины будет действовать на более жесткий упругий объект, когда они растянуты или сжимаются на одинаковую длину.
Сравнивая два упругих объекта, более упругая сила пружины будет действовать на более жесткий упругий объект, когда они растянуты или сжимаются на одинаковую длину.
Закон Гука и жесткость пружин
В этой статье мы проанализируем линейные и обратные отношения, содержащиеся в законе Гука, и приведем примеры.
Закон Гука — это фундаментальное соотношение, объясняющее, как груз на пружине растягивается этой пружиной. Здесь существует фундаментальная прямая пропорциональность с константой пропорциональности, называемой жесткостью пружины (размер нормали {k}). Однако, когда мы спрашиваем о соотношении между (нормальным размером {k}) и длиной пружины, мы обнаруживаем обратную пропорциональность! Закон Гука объясняет колебания пружины и связь с круговыми функциями. В этой статье вы узнаете- о математической форме закона Гука
- как жесткость пружины изменяется в зависимости от длины пружины
- , как колебание пружины является моделью гармонического движения.

Закон Гука: восстанавливающая сила пропорциональна смещению
В физике движение колеблющейся пружины является важным колебанием, которое дает знакомые косинусные и синусоидальные круговые функции в виде амплитуд, зависящих от времени. Истоки этого движения лежат в особенно простой линейной зависимости, которую имеют пружины до определенного момента, когда вы их смещаете. Удвоение силы увеличивает смещение вдвое. Это еще одна формулировка закона Гука. Это было открыто британским физиком Робертом Гуком в 1660 году и заявлено как [Большой {F = kx}] где (normalsize {F}) — сила, необходимая для создания смещения (normalsize {x}) в положении пружины.(Иногда этот закон появляется с отрицательным знаком и значение силы меняется на противоположное.) Это действительный закон только для относительно небольших значений (normalsize {x}), но в этом диапазоне, если вы хотите удвоить смещение, вам нужно удвоить силу, действующую на пружину. В этом случае коэффициент пропорциональности (размер нормали {k}) зависит от жесткости пружины.Пример
Предположим, у нас есть пружина, которая имеет естественную длину (нормальный размер 6) см, когда она свободно висит.Если мы поместим на пружину небольшой груз (нормальный размер 30) г, то заметим, что она растягивается на (нормальный размер 2) мм. Исходя из этого, мы можем использовать линейную зависимость, чтобы предсказать, какие расширения мы получим с другими массами. Если мы удвоим массу до (размер нормали 60) г, мы ожидаем, что струна растянется вдвое дальше, до (размер нормали 4) мм. Если, с другой стороны, мы заменим массу на (размер нормали 10) gm, то мы ожидаем, что расширение также уменьшится на треть от того, что было, а именно на (размер нормали 2/3) мм.Q1 (E): Если масса (нормальный размер 10) кг на тяжелой промышленной пружине (нормальный размер 100) см создает удлинение (нормальный размер 3) мм, то какое удлинение будет вызвано (нормальным размером 15) кг? Какую массу нам придется приложить к исходной пружине, чтобы получить удлинение (нормальный размер 5) мм?
Как жесткость пружины зависит от длины?
Но разве мы не обсуждаем обратные отношения? Закон Гука является примером прямой пропорциональности.Но за этим законом стоит другой закон, который является прекрасным примером обратной пропорциональности.
Предположим, у нас есть заданная пружина с заданной жесткостью пружины (размер нормали {k}). Что произойдет, если мы разрежем эту пружину на две части одинакового размера? Одна из этих более коротких пружин будет иметь новую жесткость пружины, которая будет (нормальный размер {2k}). В более общем смысле, жесткость пружины составляет , обратно пропорциональна длине пружины, предполагая, что мы говорим о пружине из определенного материала и толщины.
Итак, предположим, что мы разрезаем пружину в приведенном выше примере ровно на две части, создавая две более короткие пружины, каждая длиной (нормальный размер 3) см. Одна из меньших пружин будет иметь жесткость пружины , вдвое превышающую исходную . Это потому, что жесткость пружины и длина пружины обратно пропорциональны. Это означает, что при исходной массе (нормальный размер 30) грамм у более короткой пружины будет только участок (нормальный размер 1) мм. Чем больше жесткость пружины, тем меньше растяжение, создаваемое данной силой.
Надеюсь, это имеет интуитивный смысл — это не должно быть сюрпризом. Если мы подумаем об исходной пружине как о двух более коротких пружинах, соединенных вместе, то масса (нормальный размер 30) растягивает обе меньшие пружины на (нормальный размер 1) мм, давая общее растяжение (нормальный размер 2) мм.
Для тех, кто физически склонен, с соответствующими единицами измерения в этом случае сила составляет (размер нормали {F = 0,3}) Ньютон, а исходное смещение составляет (размер нормали {x = 0,002}) м. Так как (normalsize {F = kx}) в этих единицах (normalsize k = frac {0.2).
Q2 (M): Если заданная сила (размер по нормали {F}) на пружине создает смещение (размер по нормали {8}) см, а затем мы разрезаем эту пружину на три равных части, какое усилие необходимо приложить. к одной из частей, чтобы создать смещение (нормальный размер {4}) см?
Колебание пружины и гармоническое движение
Особенно простая связь между возвращающей силой и смещением в законе Гука имеет прекрасные последствия для движения колеблющейся пружины.Если вы опустите вес на пружину и отпустите ее, она будет колебаться вокруг своего среднего положения в так называемом гармоническом движении .
Довольно удивительно, но это в точности идентично другому фундаментальному движению: (normalsize {y}) — координата частицы, которая движется по единичной окружности равномерно с постоянной скоростью. Если вы посмотрите на эти два примера, надеюсь, вы увидите сходство в движениях.
Причина этого кажущегося совпадения связана с дифференциальными уравнениями, но сводится к относительно простому соотношению закона Гука.
ответы
A1. Поскольку по закону Гука расширение прямо пропорционально силе, которая для подвешенного груза прямо пропорциональна массе, мы утверждаем, что если масса (нормальный размер 10) кг создает расширение (нормальный размер 3) мм, то масса (нормальный размер 15) кг вызовет расширение (нормальный размер 4,5) мм. Чтобы получить удлинение (нормальный размер 5) мм, нам потребуется масса m, где
[Большой гидроразрыв {10} {m} = гидроразрыв {3} {5}.]Решая, получаем (размер нормали m = 50/3 = 16.7) кг.
A2. Если исходная жесткость пружины равна (размер нормали {k}), то по закону Гука прикладываемая сила равна (размер нормали {F = 8k}). Теперь для одной из более мелких частей, мы знаем, что жесткость пружины утроилась до (размер нормали k_1 = 3k). Если новая требуемая сила равна (normalsize {F_1}), то (normalsize {F_1 = 4k_1 = 4 (3k)}). Отсюда следует, что
[Большой {frac {F} {F_1} = frac {8k} {12k} = frac {2} {3}}]и поэтому (normalsize {F_1}) должен быть (normalsize {frac {3} {2}} = 1,5) раз больше (normalsize {F}).
Часто задаваемые вопросы о законе о хуках
Все, что вам нужно знать о прогибе пружины
Когда дело доходит до конструкции пружины, точность имеет значение.И единственный способ создать пружину, которая будет работать именно так, как вы хотите, — это понять точную инженерию, которая в нее входит.
При обсуждении конструкции и характеристик пружины на ум приходит множество терминов. Одним из наиболее распространенных — и наиболее важных для характеристик пружины — является прогиб пружины.
Что такое прогиб пружины? Простой ответ
Отклонение пружины — это, проще говоря, насколько далеко смещаются концы пружины при приложении к ней силы.Пружина может быть сжатой (в случае пружин сжатия) или растянутой (в случае пружин растяжения). Когда мы смотрим на движение торсионной пружины, ее отклонение будет представлять, насколько далеко перемещаются «плечи» пружины при приложении к ней силы.
Как это вписывается в общее уравнение
Теперь, когда простое определение термина отсутствует, мы можем глубже погрузиться в то, как прогиб пружины вписывается в общее уравнение, определяющее действие и реакцию пружины.
Прогиб пружины представлен буквой (x) в законе Гука, который записывается как F = kx (где F = приложенная сила, а k = жесткость пружины). Учитывая это уравнение, прогиб пружины можно рассчитать, разделив прилагаемую к ней силу (F) на постоянную пружины (k).
Важность прогиба пружины
Помимо уравнения физики, которое студенты инженерных специальностей изучают в любом классе механики, прогиб пружины является важным компонентом при проектировании и производстве прецизионных пружин.Наша команда инженеров здесь, в The Yost Superior Co., работает с нашими клиентами, чтобы точно определить их потребности и использовать их для создания нестандартных пружин, которые хорошо работают в любых условиях.
Желаемый прогиб пружины важен для определения максимальной нагрузки, которую может выдержать пружина, что помогает выполнять ее в желаемом приложении. Учет стресса, который будет испытывать пружина, также поможет продлить ее срок службы.
Помимо всего этого, наша команда также принимает во внимание условия окружающей среды, в которых будет работать ваша пружина.Вас беспокоят агрессивные химические вещества, экстремальные температуры или сильный магнетизм? Наша команда учитывает все ваши потребности и поможет выбрать правильный материал пружины, отделку и многие другие факторы, которые позволят вам получить самые эффективные пружины, которые вы когда-либо использовали.
Свяжитесь с нашей командой сегодня, чтобы начать работу.
Закон Гука — Силы и эластичность — AQA — Объединенная научная редакция GCSE — Трилогия AQA
Расширение и сжатие
Расширение происходит, когда объект увеличивается в длину, а сжатие происходит при его уменьшении.Растяжение упругого объекта, такого как пружина, описывается законом Гука:
усилие = жесткость пружины × растяжение
\ [F = k ~ e \]
Это когда:
- сила ( F ) измеряется в ньютонах (Н)
- жесткость пружины ( k ) измеряется в ньютонах на метр (Н / м)
- удлинение ( e ) или увеличение длины измеряется в метрах (м)
Пример
К пружине прилагается сила 3 Н.Пружина растягивается реверсивно на 0,15 м — тот факт, что струна растягивается реверсивно, означает, что она вернется к своей нормальной форме после того, как сила будет снята. Рассчитайте жесткость пружины.
Сначала переставьте \ (F = k \: e \), чтобы найти k :
\ [K = \ frac {F} {e} \]
Затем вычислите, используя значения в вопросе:
\ [k = 3 \ div 0,15 \]
\ [k = 20 ~ Н / м \]
Предел пропорциональности
Жесткость пружины — это мера жесткости пружины до ее предела пропорциональности или упругости предел.Предел пропорциональности относится к точке, за которой закон Гука перестает действовать при растяжении материала. Предел упругости материала — это самая дальняя точка, в которой он может быть растянут или деформирован, имея при этом возможность вернуться к своей прежней форме. Когда материал выходит за пределы своего предела упругости, его деформация считается неупругой .
Чем выше жесткость пружины, тем жестче пружина. Жесткость пружины различна для разных упругих объектов.Для данной пружины и других упругих объектов удлинение прямо пропорционально приложенной силе. Например, если усилие удваивается, удлинение удваивается. Это работает до тех пор, пока не будет превышен предел пропорциональности.
Когда упругий объект растягивается за пределы своей пропорциональности, объект не возвращается к своей исходной длине, когда сила снимается. В этом случае соотношение между силой и растяжением меняется с линейного или прямо пропорционального на нелинейное.
Нелинейное растяжение в одних материалах происходит чаще, чем в других. Такие материалы, как глина или шпатлевка, обычно имеют нелинейное расширение.
Графики силы-удлинения
Линейное удлинение и упругая деформация можно увидеть ниже предела пропорциональности.
Нелинейное растяжение и неупругая деформация могут наблюдаться выше предела пропорциональности. Предел пропорциональности также называется «пределом упругости». Градиент графика силы-растяжения до предела пропорциональности равен жесткости пружины.
Эффективная жесткость пружины для плоского периодического массива коллинеарных трещин на границе раздела двух разнородных изотропных материалов
3.1 Эффективная жесткость пружины
В задаче, рассмотренной в, смещение в дальней зоне из-за приложенного усилия можно разделить на составляющие смещения: идеально скрепленные полупространства (отсутствие трещин на границе раздела) и дополнительное смещение из-за наличия массива трещин
Δ = Δ perfect-bonding + Δ трещина
(21)
Идея состоит в том, чтобы заменить массив трещин за счет непрерывно распределенных межфазных пружин, так что они обеспечивают такую же дополнительную податливость поверхности раздела (дополнительное смещение Δ трещина ), что и за счет массива трещин ().Следуя работе Байка и Томпсона (1984), нормальная и тангенциальная жесткость пружины, k N и k T , определяются как
кН = σΔN, трещина, kT = τΔT.crack,
(22)
, где Δ N, трещина и Δ T, трещина , соответственно, представляют дополнительное смещение в нормальном и поперечном направлениях. Смещения можно рассчитать, используя теорему Кастильяно, распространенную на треснувшие тела (Тада и др., 2000):
Δcrack = ∂∂Q (2∫0aWdx),
(23)
где Q — приложенная нагрузка на единицу длины трещины по координате z . Уравнение (23) также можно получить, не прибегая к теореме Кастильяно. Энергию деформации (из-за появления трещины) в нагруженном теле можно записать в терминах межфазной жесткости и тяги в дальней зоне, учитывая работу, проделанную при приложении этих тяговых усилий. Смещение из-за трещины затем может быть получено путем дифференцирования энергии деформации по отношению к нагрузке в дальней зоне.Поскольку скорость выделения энергии деформации является известной функцией, энергию деформации можно получить интегрированием по длине трещины. Вставив уравнение. (11) в уравнение. (23) и используя (22), получаем
кН, disimilararray = kT, disimilararray = G1b (1 + κ1) (1 + α) (1 − β2) L (ab, ε),
(24)
где
L (ab, ε) = ∫0ab1sin (πx¯) [cosh3 (πx¯ε) −cos2 (πx¯2)] dx¯.
(25)
Уравнение равенства нормальной и поперечной жесткости пружины (24) является обобщением известного результата для массива двумерных трещин в однородном пространстве.Результат не очевиден из-за связи нормальных и поперечных сил в коэффициентах интенсивности напряжений (A1 – A3).
В уравнении. (25), плотность трещин a / b, и упругое рассогласование, представленное показателем колебаний ε, связаны. В разделе 2, однако, мы показали, что влияние взаимодействия трещин и упругого несоответствия на SERR может быть приблизительно разделено, когда ε мало (что имеет место для большинства реалистичных пар материалов). На основании результатов раздела 2, разложение в ряд Тейлора используется в уравнении.(25) для малых ε (| ε | <0,05), что приводит к следующему приближению для L (ab, ε):
L (ab, ε) ≈Lapproximate (ab, ε) = (1 + 4ε2) πln [ сек (πa2b)]
(26)
Подставляя уравнение (26) в уравнение. (24) имеем
кН, разнородный массив, приближенный = kT, разнородный массив, приближенный = G1b (1 + κ1) (1 + α) (1 − β2) (1 + 4ε2) π {ln [sec (πa2b )]} — 1.
(27)
Влияние упругой неоднородности и плотности трещин на жесткость пружины явно выражается через α, β, ε и a / b как в точных (Ур.(24) и (25)) и приближенной (уравнение (27)) формы. Однако в приближенной форме (уравнение (27)) упругое рассогласование и плотность трещин больше не связаны, как в точном выражении для L (ε, a / b) в уравнении. (25). Можно показать, что оба уравнения. (24) и (27) симметричны относительно индексов 1 и 2 для параметров материала на основе тождества G 1 (1 + α) / (1+ κ 1 ) = G 2 (1− α) / (1+ κ 2 ) .
Точная жесткость пружины для невзаимодействующих межфазных трещин в случае разнородных материалов может быть получена аналогичным образом, используя уравнения.(12), (22) и (23).
кН, разнородные невзаимодействующие = kT, разнородные невзаимодействующие = 8πba2G1 (1 + κ1) (1 + α) (1 − β2) (1 + 4ε2)
(28)
Можно показать, что как a / b (плотность трещин) приближается к нулю, приближенное пружинное выражение (27) для массива трещин становится уравнением. (28), т.е. уравнение. (28) является предельным случаем уравнения. (27). Таким образом, приближенное уравнение (27) для взаимодействующих трещин, которое не учитывает влияние различия материалов на взаимодействие трещин, становится точным для случая невзаимодействующих трещин между разнородными полупространствами; это последовательный результат, так как взаимодействие трещин в формуле.(28) отсутствует. Можно показать, что уравнение. (28) идентичен результату, полученному Пекорари и Келли (2000), которые исследовали жесткость пружины для невзаимодействующих трещин.
Ур. (24) и (28), соответственно, сводятся к жесткости пружины для однородного случая, задав α = β = ε = 0,
кН, однородный массив = kT, однородный массив = G1b (1 + κ1) π [ ln {sec (πa2b)}] — 1,
(29)
и
кН, однородное невзаимодействие = kT, однородное невзаимодействие = 8πba2G1 (1 + κ1),
(30)
где результаты, полученные Байком и Томпсоном (1984), получены с материалом 1, представляющим гомогенный материал.
3.2 Влияние упругой неоднородности полупространств на жесткость пружины
При сравнении эффективных пружинных выражений для невзаимодействующих трещин между слоями однородного материала (уравнение (30)) и между разнородными материалами (уравнение (28)), мы обнаруживают, что они различаются на множитель (1 + α) / [(1 − β 2 ) (1 + 4ε 2 )]. Важно отметить, что тот же фактор появляется как отношение приблизительной формы эффективной жесткости пружины для массива трещин между разнородными материалами и между слоями однородного материала.Таким образом, мы определяем M k соотношением уравнений. (28) и (30) и уравнение (28) и (30). (27) и (29) следующим образом:
Mk (α, β) = kdissimilar невзаимодействующие гомогенные невзаимодействующие = kdissimilar array, приблизительный гомогенный массив = (1 + α) (1 − β2) (1 + 4ε2)
(31)
, где нижний индекс N и T опущены, поскольку нормальная и тангенциальная жесткость пружины идентичны. Обратите внимание, что M k = 1/ M w , где M w было введено уравнением.(17); это соотношение согласуется с уравнениями (22, 23). Поскольку параметры Дундура α, β и показатель колебания ε характеризуют упругую неоднородность между полупространствами, мы можем интерпретировать M k как коэффициент упругой неоднородности (представляющий эффект упругого несоответствия) для эффективной пружины. жесткость как для невзаимодействующих трещин, так и для массива трещин и M k уменьшается до единицы для однородного случая (α = β = ε = 0).
показывает коэффициент упругой неоднородности M k в виде контурных графиков как функцию от σ и τ для всех возможных комбинаций материалов.Поскольку M k является обратной величиной M w , которая изменяется от 0,4209 до бесконечности (см. Раздел 2.2), показано, что M w изменяется от 0 до 2,376. Каждый крестик в представляет собой комбинацию материалов, предоставленную Suga et al. (1988) в условиях плоской деформации. Некоторые часто используемые комбинации материалов помечены точками в форме ромба. Контуры M k почти параллельны оси β, что указывает на то, что параметр α является доминирующим при определении значения M k .При α, близком к α ≥ −1, контуры представляют собой прямые вертикальные линии. Однако кривизна контуров увеличивается с ростом α, достигая максимума при α = +1. Обратите внимание, что M k не является симметричным относительно индексов 1 и 2 для параметров материала, так как переход к однородному материалу осуществляется в предположении, что оба материала являются материалом 1 (уравнение (30)).
Контурный график функции упругого различия для эффективной жесткости пружины. Каждый крестик (x) представляет комбинацию материалов, предоставленную Suga et al.(1988) для плоской деформации. Некоторые комбинации материалов обозначены кружком и помечены.
Горбатых и Попова (2005) показали, что нормальные упругие податливости невзаимодействующих прямолинейных, пенни-образных, эллиптических и кольцевых невзаимодействующих трещин между двумя разнородными материалами могут быть аппроксимированы решениями для однородного случая через общий параметр материала (Уравнение (9) в работе Горбатых, Попова (2005)). Можно показать, что их общий материальный параметр, выраженный через параметры Дундура, равен (1 + α) / (1-β 2 ).Следует отметить, что он отличается от M k уравнение (31) на множитель 1 / (1 + 4ε 2 ), что близко к единице, поскольку максимальное значение ε равно 12πln (3) ≈0,1748; и, таким образом, M k может быть аппроксимировано параметром различия материалов, введенным Горбатых и Поповой (2005). Это важный результат, поскольку уравнение коэффициента упругой неоднородности (31) применимо к случаю взаимодействия трещин, и, таким образом, можно предложить расширить применимость уравнения.(31) от массива двумерных трещин до взаимодействующих трехмерных плоских трещин на границе раздела между разнородными материалами.
3.3 Влияние взаимодействия трещин на жесткость пружины
Хорошо известно (Качанов (1994), Пекорари и Келли (2000)), что интерференцией между вершинами трещин для массива периодических трещин в однородном материале можно пренебречь. если плотность трещин менее 50%. Точные уравнения (24) и (25) позволяют нам проверить обоснованность этого приближения невзаимодействующей (независимой) трещины в контексте эффективной жесткости межфазной пружины между разнородными материалами.
Чтобы сделать количественную оценку погрешности взаимодействия трещин, мы рассматриваем отношение эффективной жесткости пружины для массива трещин к таковой для невзаимодействующих трещин
Ik (ab, ε) = kdissimilararraykdissimilarnon-interacting = π8a2b2 (1 + 4ε2) L (ab, ε),
(32)
, который зависит от интегрального представления L (ab, ε) в уравнении. (25). С учетом конкретных значений плотности трещин a / b и индекса колебаний ε, I k описывает влияние взаимодействия трещин на эффективную жесткость пружины.Вставка уравнения. (26) в уравнение. (32), получаем приближенный вид фактора взаимодействия, который идентичен таковому для однородного случая (ε = 0 в уравнении (32))
Ik (ab, ε) ≈kdissimilararray, приблизительно kdissimilarnon-intecting = Ikhomogenous (ab) = khomogenousarraykhomogenousnon-interacting = π28a2b2 [ln {sec (πa2b)}] — 1.
(33)
На основе уравнений. (32, 33) влияние упругого рассогласования на взаимодействие трещин можно исследовать для всех возможных значений плотности трещин, a / b , в диапазоне от единицы (невзаимодействующие трещины или «независимые» трещины) до нуля (полное удаление).
Точный коэффициент взаимодействия трещин, уравнение (32), в сравнении с a / b показан сплошными линиями для максимального значения ε = 12πln (3) ≈0,1748 и ε = 0 (случай ε = 0 идентичен уравнению (33)). Функции взаимодействия как для ε = 0 (однородный случай), так и для ε = 0,1748 остаются близкими к 0,9 при a / b = 0,5 в массиве трещин, что указывает на необходимость учета взаимодействия трещин при плотности трещин выше 50. % как для однородных, так и для разнородных материалов.Чтобы выяснить влияние ε на функцию взаимодействия, отношения точной функции взаимодействия (ε = 0,05, 0,1 и 0,1748) и функции взаимодействия для однородного случая (ε = 0) также показаны пунктирными линиями на рис. Интересно отметить, что кривая I k , показанная сплошной линией для однородного случая (ε = 0), немного выше кривой I k с ε = 0,1748 в широком диапазоне a / b и, следовательно, штриховые линии отношения I k с ε = 0.05, 0,1 и 0,1748 все ниже 1,0. Это указывает на то, что взаимодействие между трещинами немного сильнее для случая разнородных материалов. При максимальном значении ε = 0,1748 взаимодействие наибольшее. Однако различия не велики; даже для крайнего случая 95% плотности трещин ( a / b = 0,95) отношение I k остается больше 85%, как показано пунктирной линией для ε = 0,1748. Учитывая, что для большинства практичных пар материалов ε меньше 0.05, влияние упругой неоднородности на взаимодействие трещин незначительно, как видно из того, где пунктирная линия отношения I k с ε = 0,05 остается почти на уровне 1,0 для всех значений плотности трещин, a / b .
Точная функция взаимодействия для эффективной жесткости пружины с ε≈0,1748 и ε = 0 (сплошные линии) и отношения точной функции взаимодействия (ε≈0,1748, ε = 0,1 и ε = 0,05) с функцией взаимодействия для однородного случая ε≈0 (пунктирные линии).
Важно отметить, что комбинация Ур.(24), (31) и (32) и уравнений. (27), (31) и (33), соответственно, приводит к
kdissimilararray = Ik × Mk × khomogenousnon-взаимодействующий,
(34)
kdissimilararray, приблизительно = Ik однородный × Mk × khomogenousnon-взаимодействующий.
(35)
Что касается SERR, эффективная жесткость пружины для массива трещин между разнородными материалами может быть разложена на множители с точки зрения функции взаимодействия трещин I k , функции упругой неоднородности M k , и эффективная пружинная жесткость невзаимодействующих трещин для однородного однородного невзаимодействующего материала.Для наиболее реалистичных пар материалов взаимодействие трещин в случае разнородных материалов может быть аппроксимировано взаимодействием в однородном материале.
Было отмечено (Качанов и Лаурес, 1989), что взаимодействие трещин в однородном пространстве является наиболее сильным для двумерных полосовых трещин по сравнению с трехмерными формами трещин. Таким образом, наша оценка обеспечивает верхнюю границу ошибки при замене функции взаимодействия пружины для трещин между разнородными полупространствами одним и тем же распределением плоских трещин в однородном пространстве.
Простое гармоническое движение — концепции
Введение
Вы когда-нибудь задумывались, почему напольные часы показывают точное время? Движение маятника — это особый вид повторяющегося или периодического движения, называемого простым гармоническим движением или SHM. Положение колеблющегося объекта изменяется синусоидально со временем. Многие объекты колеблются взад и вперед. Движение ребенка на качелях можно приблизительно представить как синусоидальное и, следовательно, рассматривать как простое гармоническое движение.Некоторые сложные движения, такие как турбулентные волны на воде, не считаются простым гармоническим движением. Когда объект находится в простом гармоническом движении, можно легко определить скорость, с которой он колеблется вперед и назад, а также его положение относительно времени. В этой лабораторной работе вы проанализируете простой маятник и систему пружина-масса, которые демонстрируют простое гармоническое движение.Обсуждение принципов
Частица, которая колеблется вертикально в простом гармоническом движении, перемещается вверх и вниз между двумя крайними точками y = ± A .Максимальное смещение A называется амплитудой . Это движение показано графически на графике зависимости положения от времени на рисунке 1. Одно полное колебание или цикл или колебание — это движение, например, отy = −A
доy = + A
и обратно доy = −A.
Временной интервал T , необходимый для завершения одного колебания, называется периодом . Связанная величина — частота f , которая представляет собой количество колебаний, которые система делает за единицу времени.Частота обратно пропорциональна периоду и измеряется в герцах, сокращенно Гц;1 Гц = 1 с -1 .
Если частица колеблется вдоль оси y , ее положение на оси y в любой момент времени t , измеренное от начала колебания, определяется уравнением Напомним, что скорость объекта — это первая производная, а ускорение — вторая производная функции смещения по времени.Скорость v и ускорение a частицы в момент времени t определяются следующим образом.(3)
v = 2 π fA cos (2 π футов)
(4)
a = — (2 π f) 2 [A sin (2 π футов)]
Обратите внимание, что скорость и ускорение также синусоидальны. Однако функция скорости имеет разность фаз 90 ° или π /2, в то время как функция ускорения имеет разность фаз 180 ° или π относительно функции смещения.Например, когда смещение является положительным максимумом, скорость равна нулю, а ускорение — отрицательному максимуму. Подстановка из уравнения 2 в уравнение 4 дает Из уравнения 5 мы видим, что ускорение объекта в SHM пропорционально смещению и имеет противоположный знак. Это основное свойство любого объекта, совершающего простое гармоническое движение. Рассмотрим несколько критических точек в цикле, как в случае колебательной системы пружина-масса. Система пружина-масса состоит из массы, прикрепленной к концу пружины, подвешенной на стойке.Масса слегка опускается и отпускается, чтобы заставить пружину и массу колебаться в вертикальной плоскости. На рисунке 2 показаны пять критических точек, когда нагрузка на пружину проходит полный цикл. Положение равновесия для системы пружина-масса — это положение массы, когда пружина не растягивается и не сжимается. Масса завершает полный цикл, перемещаясь из положения A в положение E. Описание каждой позиции приводится ниже. Положение A: пружина сжата; масса выше точки равновесия приy =
A и вот-вот будет выпущена.Положение B: Масса движется вниз, проходя через точку равновесия. Положение C: Груз на мгновение находится в состоянии покоя в самой нижней точке перед тем, как начать движение вверх. Положение D: Масса движется вверх, проходя через точку равновесия. Положение E: гиря на мгновение находится в состоянии покоя в наивысшей точке, прежде чем снова двинуться вниз. Отметив время, когда отрицательное максимальное, положительное максимальное и нулевое значения возникают для положения, скорости и ускорения колеблющегося объекта, вы можете построить график функции синуса (или косинуса).Это сделано для случая колеблющейся системы пружина-масса в таблице ниже, а три функции показаны на рисунке 3. Обратите внимание, что положительное направление обычно выбирается как направление, в котором пружина растягивается. Следовательно, положительное направление в этом случае — вниз, а исходное положение A, на Фигуре 2 фактически является отрицательным значением. Самый сложный параметр для анализа — это ускорение. Это помогает использовать второй закон Ньютона, который говорит нам, что отрицательное максимальное ускорение происходит, когда результирующая сила равна отрицательному максимуму, положительное максимальное ускорение происходит, когда результирующая сила равна положительному максимуму, и ускорение равно нулю, когда результирующая сила равна нулю.Для этого конкретного начального условия (начальное положение в точке A на рисунке 2) кривая положения является функцией косинуса (фактически отрицательной функцией косинуса), кривая скорости является функцией синуса, а кривая ускорения является просто отрицательной функцией кривой положения. .Масса и пружина
Масса, подвешенная на конце пружины, растянет ее на некоторое расстояние y . Сила, с которой пружина тянет вверх груз, определяется по формуле Hooke ‘ s law где k — жесткость пружины, а y — растяжение пружины при приложении к ней силы F .Константа пружины k является мерой жесткости пружины. Жесткость пружины может быть определена экспериментально, позволяя грузу неподвижно висеть на пружине, а затем добавляя дополнительную массу и записывая дополнительное растяжение пружины, как показано ниже. На рисунке 4а подвеска груза подвешена к концу пружины. На рисунке 4b к подвеске добавлена дополнительная масса, и теперь пружина выдвигается на величинуΔy.
Эта экспериментальная установка также показана на фотографии устройства на рисунке 5.Когда масса неподвижна, ее ускорение равно нулю. Следовательно, согласно второму закону Ньютона, результирующая сила должна быть равна нулю. На массу действуют две силы: сила тяжести, направленная вниз, и сила пружины, направленная вверх. См. Диаграмму свободного тела на Рисунке 6 ниже. Итак, второй закон Ньютона дает нам гдеΔm
— изменение массы,Δy
— изменение растяжения пружины, вызванное изменением массы, г — ускорение свободного падения, а k — жесткость пружины.Уравнение 7 также можно выразить как Второй закон Ньютона, примененный к этой системе, равенma = F = −ky.
Подставим из уравнения 5a = −4 π 2 f 2 y.
для разгона получить(9)
м (−4 π 2 f 2 y) = −ky
откуда получаем выражение для частоты f и периода T .(10)
f =(11)
Т = 2 πT 2
от м будет прямой, а жесткость пружины можно определить по наклону.Простой маятник
Другой пример простого гармонического движения, который вы исследуете, — это простой маятник . Простой маятник состоит из массы м , называемой бобом маятника, прикрепленной к концу веревки. Длина L простого маятника измеряется от точки подвешивания струны до центра боба, как показано на Рисунке 7 ниже. Если боб перемещен из положения покоя на некоторый угол смещения θ , как на рисунке 8, возвращающая сила вернет боб обратно в положение равновесия.Силы, действующие на боб, — это сила тяжести и сила натяжения струны. Сила натяжения струны уравновешивается составляющей силы тяжести, которая соответствует струне (то есть перпендикулярна движению боба). Возвращающей силой здесь является тангенциальная составляющая гравитационной силы. Когда мы применяем тригонометрию к меньшему треугольнику на рисунке 8, мы получаем величину возвращающей силы | F | = мг sin θ .Эта сила зависит от массы боба, ускорения свободного падения g и синуса угла, на который натянута струна. Снова должен применяться второй закон Ньютона, поэтому(13)
ма = F = −mg sin θ
где отрицательный знак означает, что возвращающая сила действует противоположно направлению движения боба. Поскольку боб движется по дуге окружности, угловое ускорение определяется какα = a / L.
Из уравнения 13 получаем На рисунке 9 синяя сплошная линия представляет собой график зависимости sin ( θ ) от θ , а прямая линия представляет собой график θ в градусах по сравнению с θ в радианах. Для малых углов эти две кривые почти неразличимы. Следовательно, пока смещение θ мало, мы можем использовать приближение sin θ ≈ θ . В этом приближении уравнение 14 принимает вид Уравнение 15 показывает, что (угловое) ускорение пропорционально отрицательному значению (углового) смещения, и поэтому движение боба является простым гармоническим, и мы можем применить уравнение 5a = −4 π 2 f 2 г.
получить Комбинируя уравнение 15 и уравнение 16 и упрощая, мы получаем(17)
f =(18)
Т = 2 πCopyright © 2013 Advanced Instructional Systems, Inc. и Государственный университет Северной Каролины | Кредиты
границ | Экспериментальное исследование подвески сиденья переменной жесткости, установленной с компактным поворотным амортизатором MR
Введение
Вибрация, передаваемая от неровных поверхностей дороги, вибрирующих инструментов и вибрирующих механизмов на тело водителя транспортного средства, значительно снижает комфорт водителя.Гораздо серьезнее эта проблема в горнодобывающей промышленности, на строительных площадках и в сельском хозяйстве. Длительное воздействие вибрации вызовет серьезные нарушения здоровья сидящих на сиденьях людей (Национальное наблюдение за воздействием опасных факторов, 2009 г., Motmans, 2012 г.). Например, вибрация оказывает значительное негативное влияние на здоровье водителя, она также легко вызывает усталость водителя, которая была основным фактором, способствовавшим значительному проценту аварий, включая аварии со смертельным исходом (DETR, 2000, Haworth, 1998; Законодательный Ассамблея Квинсленда: парламентский комитет по безопасности путешествий, 2005 г.).Физическая боль очень распространена при работе, связанной с вождением, особенно при длительной работе и на расстоянии, а также в суровых условиях с использованием внедорожных транспортных средств или машин (таких как строительные машины или грузовики, горнодобывающие машины и экскаваторы). Чтобы активно снизить утомляемость водителя и улучшить его здоровье, срочно необходима усовершенствованная подвеска сиденья, которая способна обеспечить лучший комфорт езды.
На сегодняшний день пассивный (Zhao et al., 2018), полуактивный (Gad et al., 2017; Sun et al., 2017; Нинг и др., 2018; Phu et al., 2018) и активного (Ning et al., 2017; Alfadhli et al., 2018; Maciejewski et al., 2018) подвески сиденья. Пассивная подвеска сиденья проста, надежна и экономична. Однако он не может обеспечить управляемую силу, и, следовательно, его производительность неизбежно ограничена. При сохранении геометрических и динамических свойств пассивной конструкции подвески, активное или полуактивное устройство было рассмотрено для включения в современные конструкции подвески сидений для удовлетворения растущих требований.В частности, полуактивные подвески сидений предлагают желаемые характеристики, сопоставимые с характеристиками активных сидений, не требуя высокого энергопотребления и дорогостоящего оборудования (Li et al., 2014; Sun et al., 2019; Yang et al., 2020b). В последние десятилетия своего рода интеллектуальный материал, магнитореологическая жидкость (MRF), был предпочтительным выбором для создания реалистичных полуактивных устройств (Yu et al., 2009; Guo et al., 2015; Yu et al., 2016 ; Yu et al., 2018; Deng et al., 2019; Nguyen et al., 2019; Tu et al., 2019). MRF обладает магниточувствительными реологическими свойствами и приобрел популярность с момента выхода на рынок коммерческих автомобилей. MRF очень чувствителен к магнитному полю, с расчетным временем отклика менее 10 мс (Carlson and Jolly, 2000; Eshaghi et al., 2015; Nakano, 2015; Abe et al., 2019) и требует относительно низкой мощности для работают (Li et al., 2003; Hu et al., 2014; Liu et al., 2019; Yu et al., 2019). Полуактивные подвески сидений с амортизаторами MR стали новым направлением исследований и улучшили характеристики снижения вибрации.Например, Чой и Хан (Choi and Han, 2007; Phu et al., 2018) применили амортизаторы MR для ослабления вертикальной вибрации сиденья. Группа Уэрли (Choi and Wereley, 2005; Wereley et al., 2011) исследовала применение глушителя MR в кресле экипажа вертолета для повышения его ударопрочности. Бай применил подвеску сиденья MR для уменьшения столкновений и вибраций наземных транспортных средств (Bai et al., 2013; Bai and Wereley, 2014).
Несмотря на успехи в разработке подвески сиденья MR, все еще существует несколько критических недостатков, затрудняющих выполнение различных сложных рабочих сценариев.Для традиционной подвески сиденья MR без контроля жесткости ее основной особенностью является обеспечение контролируемого демпфирования для рассеивания энергии вибрации с целью уменьшения неблагоприятного воздействия, однако у нее отсутствует возможность изменять жесткость, что не позволяет избежать вибрации. резонанс. Возбуждения вибрации охватывают широкий диапазон частот, так что вполне возможно согласовать резонансную частоту подвески сиденья; как только это произойдет, подвеска сиденья будет подвергаться сильной вибрации даже при регулируемом регулировании демпфирования.Кроме того, для более универсальной подвески сиденья требуется обеспечить не только высокую жесткость для эффективного поддержания устойчивости езды, но и низкую жесткость для сохранения комфорта езды. Однако традиционная подвеска сиденья MR без контроля жесткости не может удовлетворить это противоречивое требование жесткости, потому что она может установить жесткость только пружины, чтобы гарантировать стабильность движения и достаточный ход, жертвуя комфортом езды. Кроме того, требуется разная жесткость подвески, чтобы соответствовать разному спектру дорог и весу пассажиров.Подводя итог, можно сказать, что традиционная подвеска сиденья MR без контроля жесткости не способна реализовать нерезонансное регулирование или адаптироваться к различным дорожным условиям и весу водителя.
Чтобы удовлетворить вышеуказанным требованиям, необходимо разработать новую подвеску сиденья MR с регулируемой жесткостью. Основная проблема при реализации такой подвески сиденья — найти подходящий механизм для реализации переменной жесткости. Кроме того, компоненты подвески сиденья должны быть компактными, чтобы их можно было установить в сиденье без сложного изменения конструкции.Следуя требованиям и целям, в этом документе предлагается новая подвеска сиденья, которая может иметь переменную жесткость. Его основные достоинства заключаются в том, что он включает в себя поворотный демпфер MR, который использует регулируемое демпфирование для реализации переменной жесткости, и что компактная конструкция позволяет устанавливать поворотный демпфер VS MR на подвеске сиденья без каких-либо изменений конфигурации. Свойство управляемости жесткостью позволяет смещать собственную частоту подвески от частоты возбуждения, чтобы избежать резонанса вибрации.В частности, начальная жесткость подвески может быть низкой для достижения хорошего комфорта при движении, а затем ее можно регулировать в реальном времени, чтобы гарантировать устойчивость при движении. Кроме того, жесткость подвески сиденья можно регулировать в зависимости от дорожного покрытия и веса пассажиров. Структура этой статьи подробно описана ниже. Конструкция и рабочий механизм новой подвески сиденья В разделе показано устройство и рабочий механизм новой подвески сиденья.В разделе «Экспериментальные характеристики» представлены экспериментальные характеристики жидкостей MR (MRF) и подвески сиденья MR и, соответственно, были проанализированы эффективная жесткость и эквивалентное демпфирование. Характеристики гашения вибрации новой подвески сиденья MR оцениваются в разделе «Оценка характеристик виброизоляции» и Заключение Раздел делает вывод.
Конструкция и рабочий механизм новой подвески сиденья
Конструкция новой подвески сиденья
Новая подвеска сиденья была разработана путем установки поворотного амортизатора VS MR под сиденьем коммерческого автомобиля, как показано на рисунке 1C.На рис. 1А представлена подробная схематическая структура поворотного демпфера VS MR, который состоит из коробки передач, торсионной пружины и демпфирующего элемента MR. Один конец торсионной пружины прикреплен к цилиндру коробки передач, а другой конец — к цилиндру амортизатора MR через опору пружины. Демпфирующий блок отвечает за создание управляемого крутящего момента на основе реологических свойств MRF, то есть он обеспечивает высокий крутящий момент, когда на его электромагнитную катушку подается большой ток, и в противном случае он обеспечивает небольшой крутящий момент.Коробка передач с передаточным числом 5: 1 затем работает, чтобы усилить выходной крутящий момент демпфирующего блока, чтобы удовлетворить требуемую максимальную силу подвески сиденья. Поскольку торсионная пружина соединяет демпфирующий блок и коробку передач, изменение жесткости может быть реализовано путем регулирования величины тока, подаваемого на амортизатор MR.
РИСУНОК 1 . Модель конструкции и прототип модели подвеска VS MR .
Сборка новой подвески сиденья
На рисунке 1B показан монтаж поворотного демпфера VS MS на подвеске сиденья.Подвеска сиденья имеет две ножничные конструкции на двух боковых сторонах, одна из которых будет установлена с демпфером VS MR. На рис. 1В показано, что демпфер был установлен с левой стороны подвески сиденья, в частности, вал демпфера VS MR прикреплен к одной балке ножничной конструкции, а цилиндр демпфера закреплен другим в той же конструкции. ножничная конструкция. Когда это сиденье подвергается вертикальной вибрации, две балки ножничной конструкции вращаются относительно в противоположных направлениях, что приводит во вращение вращающийся глушитель MR.Таким образом, вертикальная линейная вибрация во вращающемся демпфере преобразуется во вращательные движения.
Принцип работы новой подвески сиденья
Поворотный амортизатор MR VS обеспечивает регулируемую жесткость подвески сиденья. Реализация контролируемой жесткости зависит от взаимодействия пружины и изменчивости демпфирования, обеспечиваемой демпфирующим устройством. Демпфирование блока демпфирования MR увеличивается постепенно по мере увеличения тока, подаваемого для питания электромагнитной катушки, соответственно, относительное вращение между валом и цилиндром демпфирующего блока будет становиться все более трудным.В этом случае деформация торсионной пружины будет увеличиваться при таком же внешнем возбуждении, и поворотный демпфер VS MR будет иметь более высокую жесткость. Приложенный ток контролирует деформацию торсионной пружины и, следовательно, общую жесткость подвески. В частности, вал может легко вращаться относительно своего цилиндра, когда демпфирование демпфирующего узла невелико. В этом случае торсионная пружина не деформируется, поэтому поворотный демпфер VS MR демонстрирует низкую жесткость.В качестве альтернативы, когда демпфирование достаточно велико и крутящий момент, создаваемый торсионной пружиной, не может преодолеть демпфирующую силу, цилиндр демпфера не имеет относительного движения относительно вала, и торсионная пружина будет деформироваться во время работы. В этом случае поворотный демпфер VS обеспечивает максимальную жесткость. Средняя жесткость, которая находится между минимумом и максимумом, может быть реализована путем регулирования величины приложенного тока.
Экспериментальная характеристика
Характеристика жидкостей MR
MRF, используемый в этой работе, приобретен в Пекинском научно-исследовательском институте сенсорных технологий Guohao, Китай (модель: GH-MRF-250, плотность: 2.55 г см −3 ). Его сдвиговые свойства измеряли с помощью реометра (Physica MCR 301, компания Anton Paar, Германия). На рис. 2А показаны характеристики предела текучести MRF в зависимости от плотности магнитного потока. Из этого рисунка видно, что увеличение плотности магнитного потока приводит к увеличению предела текучести MRF. На рисунке 2B представлена информация о вязкости MRF в зависимости от скорости сдвига. Вязкость на рисунке 2B была измерена без присутствия магнитного поля, а скорость сдвига была увеличена с 0.1 с −1 до 1000 с −1 . Видно, что вязкость резко уменьшается, а затем имеет тенденцию к выравниванию, когда скорость сдвига продолжает увеличиваться. Используя MRF, демпфирующий блок MR, показанный на рисунке 1A, может создавать управляемый крутящий момент, и, соответственно, выходная сила, создаваемая всем демпфером VS MR, может управляться приложенным постоянным током.
РИСУНОК 2 . Собственность MRF. (A) Характеристики предела текучести (B) Информация о вязкости.
Динамическое испытание подвески сиденья MR с помощью машины MTS
Факторы, влияющие на характеристики подвески сиденья, в основном включают приложенный постоянный ток к магнитной катушке вращающегося демпфера MR, амплитуду смещения и частоту нагрузки внешнего вертикальное возбуждение. Чтобы изучить, как эти факторы влияют на характеристики подвески, были разработаны и проведены динамические испытания для изучения гистерезисного поведения подвески сиденья при различных токах, частотах и амплитудах нагрузки.С помощью этих испытаний можно рассчитать эквивалентное демпфирование и эффективную жесткость подвески сиденья при различных условиях нагрузки. Экспериментальная установка с использованием машины MTS ( Materials Test Systems, Landmark Servohydraulic Test Systems, МОДЕЛЬ 370.02, США ) показана на Рисунке 3.
РИСУНОК 3 . Экспериментальная установка тестирования МТС.
Характеристики при разных токах
Зависимые от поля свойства являются наиболее важными характеристиками интеллектуальной системы, поскольку они определяют ее управляемость в реальном времени.Таким образом, серия токов катушки использовалась для возбуждения подвески, чтобы получить ее поведение, зависящее от поля. В качестве возбуждения был выбран синусоидальный сигнал с частотой 1 Гц и постоянной амплитудой смещения (5, 10 и 15 мм). Для каждого тестового случая ток изменяли с 0 до 2 А с шагом 0,5 А. Таким образом, всего было проведено 15 случаев. И для каждого тестирования было выполнено достаточное количество циклов до сбора удовлетворительных данных, чтобы гарантировать согласованность.На рис. 4 показана осевая сила, создаваемая подвеской сиденья при различных токах во временной области. Он находится в вертикальном направлении и обеспечивает амортизирующую силу подвески сиденья. Можно видеть, что максимальная сила увеличивается при увеличении тока, что соответствует механизму, согласно которому поворотный демпфер MR показывает возрастающую жесткость при увеличении приложенного тока.
РИСУНОК 4 . Генерируемая сила при разных токах во временной области.
Для более точного наблюдения за зависимостью от поля на рис. 5A – C показаны петли гистерезиса зависимости силы и смещения при различных токах.Каждый контур получен при постоянной амплитуде внешнего возбуждения — 5, 10 и 15 мм соответственно. Обнаружено, что при определенных амплитудах возбуждения жесткость явно увеличивается при изменении тока от 0 до 0,5 А, однако скорость ее увеличения уменьшается при дальнейшем увеличении тока. Для разных амплитуд может наблюдаться одно и то же явление с точки зрения свойства зависимости от поля. Для каждой петли гистерезиса эффективная жесткость, которая будет проанализирована в следующем разделе, получается путем вычисления наклона сегмента AB, как показано на рисунке 5A, с использованием следующего выражения:
keff = 1n − 1∑n = 2∞yn − yn −1xn − xn − 1 (1), где n указывает количество точек на сегменте AB, ( x n , y n ) представляет координату n -я точка.Поскольку сегменты AD и BC образовались в результате демпфирования трения подвески сиденья, они не учитываются при расчете эффективной жесткости.
РИСУНОК 5 . Петли сила-смещение при различных токах и амплитудах. (A) Возбуждение амплитудой 5 мм. (B) Возбуждение амплитудой 10 мм . (C) Амплитуда возбуждения 15 мм
Рабочие характеристики при различных частотах
Чтобы исследовать влияние частоты нагружения на рабочие характеристики подвески, была проведена серия испытаний при различных частотах.Выбранные частоты для теста были 0,1, 1, 2 и 3 Гц. Амплитуда смещения была установлена 5 мм. И для этого теста были выбраны два значения тока (0 А и 2 А).
На рисунке 6 показаны результаты тестирования при различных частотах с током 0 А, а на рисунке 7 показаны его характеристики при 2 А. Можно видеть, что частота нагрузки оказывает очень небольшое влияние на петли гистерезиса независимо от того, был ли приложен ток или нет, указывая на то, что изменение частоты нагружения не окажет очевидного влияния на пиковую силу, жесткость или демпфирование.Таким образом, можно сделать вывод, что изменение частоты нагружения не вызовет очевидного изменения характеристик подвески. Сравнивая рисунок 6 и рисунок 7, можно увидеть, что большее осевое усилие было создано при давлении 2 А. Это можно объяснить зависимостью от поля, как показано на рисунке 5.
РИСУНОК 6 . Петли сила-смещение при отсутствии тока на разных частотах.
РИСУНОК 7 . Петли сила-смещение с током 2 А, приложенным на разных частотах.
Динамические свойства при различных смещениях
В этом подразделе проверяются характеристики подвески сиденья при различных смещениях, значения которых были установлены на 5, 10 и 15 мм. Частота нагрузки была установлена на 1 Гц, а ток был установлен на 0 А. Экспериментальные результаты, показывающие зависимость силы от смещения, показаны на Рисунке 8.
РИСУНОК 8 . Петли сила-смещение без приложения тока при различных амплитудах возбуждения.
Анализ эффективной жесткости и эквивалентного демпфирования
Анализ эффективной жесткости
Для подвески сиденья комфорт движения водителя или пассажира является важным показателем для оценки ее характеристик.А комфорт езды во многом зависит от жесткости подвески сиденья. На рисунках 9 и 10 представлены расчетные значения эффективной жесткости, соответствующие разным амплитудам и токам. Эффективная жесткость была рассчитана с использованием экспериментально полученных наборов данных, которые представлены на рисунке 5.
РИСУНОК 9 . Эффективная жесткость подвески сиденья MR при разной амплитуде возбуждения.
РИСУНОК 10 . Эффективная жесткость подвески сиденья MR, приложенная к разным токам.
На рисунках 9 и 10 показана зависимость между эффективной жесткостью и смещением, а также током. Оба этих рисунка показывают, что для фиксированного тока жесткость уменьшается с увеличением амплитуды. Однако, когда амплитуда постоянна, жесткость увеличивается с увеличением тока. Но скорость увеличения жесткости уменьшается при дальнейшем увеличении тока, что подтверждает, что общая жесткость увеличивается с увеличением тока до тех пор, пока демпфирующая сила не станет достаточно большой, чтобы преодолеть силу, создаваемую торсионной пружиной.Результаты расчетов согласуются с наблюдениями на рисунке 5. Планки погрешностей со стандартным отклонением для вычисленной эффективной жесткости также представлены на рисунке 10. Они показывают, что эффективная жесткость для каждой группы экспериментальных данных распределена в среднем с центром в приемлемом стандарте. отклонения.
Расчет эквивалентного демпфирования
Для изучения характеристик рассеивания энергии данной подвеской VS MR был рассчитан эквивалентный коэффициент вязкого демпфирования.Эквивалентный коэффициент вязкого демпфирования можно получить из (Li et al., 2000):
, где EDC — энергия, рассеиваемая за цикл, или площадь, ограниченная петлей гистерезиса, f — частота нагружения, а Δ — максимальное смещение внешнего возбуждения. Замкнутая площадь может быть рассчитана с помощью MATLAB, затем эквивалентный коэффициент вязкого демпфирования может быть рассчитан согласно формуле. 1. Расчетное эквивалентное демпфирование представлено на рисунках 11 и 12.
РИСУНОК 11 . Эквивалентное демпфирование подвески сиденья MR при разных амплитудах возбуждения.
РИСУНОК 12 . Эквивалентное демпфирование подвески сиденья MR применяется с разными токами.
На рисунках 11 и 12 показана зависимость между эквивалентным коэффициентом демпфирования и током, а также амплитудой смещения. Из рисунка 11 видно, что коэффициент демпфирования демонстрирует тенденцию к уменьшению с увеличением амплитуды при фиксированном токе, однако для постоянной амплитуды коэффициент вязкого демпфирования показывает небольшое колебание, которое сначала увеличивается, а затем уменьшается при дальнейшем увеличении тока.Рисунок 12 также отражает тот факт, что вязкое демпфирование чувствительно к изменению тока, но менее чувствительно к изменениям амплитуды смещения.
Оценка характеристик виброизоляции
На рисунке 13 показана экспериментальная установка для оценки характеристик виброизоляции предлагаемой системы подвески. Различные возбуждения, включая случайное возбуждение и гармоническое возбуждение, генерировались встряхивающим столом для возбуждения подвески сиденья.Два акселерометра использовались для измерения ускорений возбуждения и подвески сиденья соответственно. Учитывая, что соответствующий контроллер критически важен для достижения хорошей производительности системы подвески, был разработан и реализован контроллер на основе кратковременного преобразования Фурье (STFT) (Yang et al., 2020a) с целью управления жесткостью и реализации нерезонансное управление. Алгоритм STFT отвечает за определение частоты вибрации; затем эта частота возбуждения будет сравниваться с собственной частотой подвески сиденья.Когда частота возбуждения близка к собственной частоте подвески сиденья, жесткость подвески сиденья будет отрегулирована для смещения ее собственной частоты от частоты возбуждения во избежание резонанса. После создания контроллера была проведена экспериментальная оценка подвески сиденья. Ускорение подвески сиденья, а также проходимость являются основными критериями оценки. Сигнал ускорения, измеренный со стола для встряхивания, отправлялся в контроллер для обработки для определения доминирующей частоты вибрации.Затем частотный контроллер вычисляет желаемый управляющий выходной сигнал с помощью алгоритмов STFT и отправляет его на усилитель мощности. Затем усиленный ток направлялся в демпфер для регулирования его жесткости. В ходе эксперимента оценивали три различных суспензии: пассивно отключенные, пассивные и полуактивные. Пассивная подвеска означает, что на демпфер не подается ток; пассивная подвеска означает, что на демпфер подается постоянный ток (2 А); а полуактивная подвеска означает, что подвеска управляется контроллером STFT в режиме реального времени.Подвески с пассивным включением и пассивным отключением приведены для сравнения с полуактивными суспензиями. Результаты оценки представлены на Рисунке 14 и Рисунке 15B.
РИСУНОК 13 . Экспериментальная установка для оценки характеристик виброизоляции (CompactRIO: Crio-9074, CPU 400 МГц, 128 МБ DRAM, 256 МБ Speicher, FPGA mit 2 Millionen Gattern, восемь слотов).
РИСУНОК 14 . Пропускная способность трех различных подвесок.
РИСУНОК 15 . Ускорение случайного возбуждения. (A) возбуждение, (B) ответ.
Рисунок 14 иллюстрирует способность трех подвесок передавать ускорение. Поскольку это отношение ускорения сиденья к ускорению возбуждения, чем ниже его значение, тем лучше его характеристики. Видно, что собственная частота в случае пассивного выключения меньше, чем в случае пассивного включения. Это связано с тем, что жесткость вращающегося MR демпфера VS увеличивается с увеличением приложенного тока и, соответственно, увеличивается собственная частота.Две проницаемости для случая пассивного включения и пассивного выключения имеют пересекающуюся частоту, как показано буквой P на рисунке 14. Можно видеть, что проводимость в случае пассивного включения является самой низкой, когда частота возбуждения меньше, чем это пересекаемая частота, в противном случае передаваемость в случае пассивного выключения будет самой низкой. Следовательно, минимальная проницаемость может быть получена путем соединения этих двух сегментов. Затем наблюдается, что проводимость полуактивного режима управления может просто отслеживать минимальную проницаемость: она почти остается совместимой с проводимостью в случае пассивного включения до пересекаемой частоты, а затем снижается до проводимости пассивного отключения. случай, когда частота возбуждения выше, чем частота пересечения.Таким образом, можно сделать вывод, что подвеска сиденья VS MR с полуактивным управлением лучше всего справляется с уменьшением реакции на ускорение. В качестве вспомогательного материала предоставляется видео, показывающее сравнение характеристик пассивной подвески и полуактивной подвески на трех типичных частотах, то есть 1,3, 1,5 и 1,6 Гц. На рис. 15В представлены характеристики ускорения подвески сиденья при случайном возбуждении. Случайное возбуждение генерируется методом, представленным в (Yang et al., 2000c), который получил широкое распространение для оценки характеристик подвески и показан на рисунке 15A. Этот результат оценки дополнительно доказывает, что ускорение подвески полуактивной подвески остается наименьшим за все время по сравнению с двумя другими пассивными случаями.
Чтобы лучше понять улучшение полуактивной подвески сиденья по сравнению с пассивной, введен стандарт ISO 2631, как показано в таблице 1 (Международная организация по стандартизации, 1997), в которой уровни комфорта классифицированы в соответствии с вероятными реакциями человека на различные величины вибрации.Соответственно, среднеквадратичные значения, взвешенные по оси Z, учитывающие комфорт езды пассажиров, были рассчитаны и сведены в таблицу в таблице 2. Из таблицы 2 видно, что уровень комфорта, достигаемый с помощью пассивной подвески и пассивной подвески, составляет уровень C. что означает «довольно неудобно», однако уровень комфорта, достигаемый полуактивной подвеской, составляет уровень B, что означает «немного неудобно». Сравнение показало, что полуактивная подвеска принесла пассажирам более высокий уровень комфорта.
ТАБЛИЦА 1 . Примерные признаки возможных реакций на вибрацию различной силы.
ТАБЛИЦА 2 . Средневзвешенные значения ускорений для трех подвесок.
Заключение
Вращающийся амортизатор MR, способный выполнять переменные характеристики жесткости, был успешно разработан и затем использован для реализации полуактивной подвески сиденья с целью преодоления недостатка традиционного амортизатора MR, заключающегося в том, что он не может реализовать нерезонанс контроль.Затем подвеска сиденья была охарактеризована с помощью машины MTS с точки зрения зависимого от поля ответа, амплитудно-зависимого ответа и частотно-зависимого ответа. Результаты испытаний показали, что жесткость и создаваемая сила увеличиваются в ответ на увеличение тока, но немного уменьшаются при увеличении амплитуды смещения. Эта изменчивость жесткости указывает на то, что новая подвеска сиденья способна удовлетворить противоречивое требование жесткости, т.е.е., он может обеспечить не только высокую жесткость, чтобы гарантировать устойчивость при езде, но и низкую жесткость для достижения лучшего комфорта при езде. Кроме того, жесткость подвески нечувствительна к изменениям частоты нагружения. Что касается свойства демпфирования, экспериментальные результаты показывают, что эквивалентный коэффициент демпфирования уменьшается, когда амплитуда смещения увеличивается, и что приложенный увеличивающий ток оказывает небольшое влияние на эквивалентное демпфирование. В экспериментах по виброизоляции сравнивались реакции различных подвесок.Результаты показали, что подвеска сиденья с полуактивным управлением лучше всего снижает ускорение подвески.
Заявление о доступности данных
Необработанные данные, подтверждающие выводы этой статьи, будут предоставлены авторами без излишних оговорок.
Вклад авторов
SS и JY внесли равный вклад в эту работу. SS, JY и PW: методология, программное обеспечение и формальный анализ. SS и WL: концептуализация. SS, JY, PW, MN и LS: проверка и исследование.SS, SZ и WL: курирование ресурсов и данных. SS и JY: написание — подготовка и визуализация оригинального проекта. Все авторы: написание – рецензирование и редактирование. SS и WL: надзор и администрирование проекта.
Финансирование
Это исследование поддержано ARC Linkage Project (Grand No. LP150100040), JSPS Grant-in-Aid for Research Activity Start-up (Grand No. 19K23476), для молодого исследователя B (Grand No. 20K14688) и для стипендии JSPS (грант № 19F19712) и Национальной программы ключевых исследований и разработок Китая (гранты №2018YFB1201703).
Конфликт интересов
Авторы заявляют, что исследование проводилось в отсутствие каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Ссылки
Абэ, Х., Нака, Т., Сато, К., Судзуки, Ю. и Накано, М. (2019). Формоуправляемые синтезы микрочастиц магнетита и их магнитореология. Внутр. J. Mol. Sci. 20, 3617. doi: 10.3390 / ijms20153617
CrossRef Полный текст | Google Scholar
Альфадли, А., Дарлинг, Дж., И Хиллис, А. Дж. (2018). Контроллер активного сиденья с упреждающей и обратной связью подвески автомобиля: экспериментальное исследование. Заявл. Sci. 8, 603. doi: 10.3390 / app8040603
CrossRef Полный текст | Google Scholar
Бай, X.-X., Hu, W., and Wereley, N.M (2013). Магнитореологический демпфер с внутренним байпасом для подвески наземных транспортных средств. IEEE Trans. Magn. 49, 3422–3425. doi: 10.1109 / tmag.2013.2241402
CrossRef Полный текст | Google Scholar
Bai, X.-X., И Уэрли, Н. М. (2014). «Подвески сидений с магнитореологическим воздействием для смягчения последствий столкновений с наземными транспортными средствами», SPIE «Умные конструкции и материалы + неразрушающая оценка и мониторинг состояния», Сан-Дейго, Калифорния, апрель 2014 г. (Международное общество оптики и фотоники).
CrossRef Полный текст | Google Scholar
Carlson, JD, and Jolly, MR (2000. MR жидкости, пена и эластомерные устройства. Mechatronics 10, 555–569. Doi: 10.1016 / s0957-4158 (99) 00064-1
CrossRef Full Text | Google Scholar
Choi, S.-Б., И Хан, Ю.-М. (2007). Контроль вибрации электрореологической подвески сиденья с моделью тела человека с помощью управления скользящим режимом. J. Sound Vib. 303, 391–404. doi: 10.1016 / j.jsv.2007.01.027
CrossRef Полный текст | Google Scholar
Choi, Y.-T., and Wereley, N.M (2005). Снижение биодинамической реакции на ударные нагрузки с помощью магнитореологической подвески кресел экипажа вертолета. J. Aircraft, 42, 1288–1295. doi: 10.2514 / 1.6839
CrossRef Полный текст | Google Scholar
Deng, H., Deng, J., Yue, R., Han, G., Zhang, J., Ma, M., et al. (2019). Разработка и проверка подвески сиденья с переменной жесткостью и демпфированием. Smart Mater. Struct. 28. doi: 10.1088 / 1361-665x / ab18d4
CrossRef Полный текст | Google Scholar
DETR, (2000), Дороги завтрашнего дня — безопаснее для всех . Лондон, Соединенное Королевство: Департамент окружающей среды, транспорта и регионов.
Эшаги, М., Ракхеджа, С., Седагати, Р. (2015). Точный метод определения характеристик МР-жидкостей перед выходом текучести. Smart Mater. Struct. 24. doi: 10.1088 / 0964-1726 / 24/6/065018
CrossRef Полный текст | Google Scholar
Gad, S., Metered, H., Bassuiny, A., and Abdel Ghany, A. (2017). Многоцелевой генетический алгоритм ПИД-регулятор дробного порядка для полуактивной магнитореологически демпфированной подвески сиденья. J. Vib. Contr. 23, 1248–1266. doi: 10.1177 / 1077546315591620
CrossRef Полный текст | Google Scholar
Guo, C., Gong, X., Zong, L., Peng, C., and Xuan, S.(2015). Магнитореологический демпфер с двумя трубами и байпасом для использования в железнодорожном транспорте. Proc. Inst. Мех. Англ. — Часть F J. Скоростной железнодорожный транспорт 229, 48–57. doi: 10.1177 / 0954409713497199
CrossRef Полный текст | Google Scholar
Хаворт, Н. Л., Триггс, Т. Дж., И Грей, Э. М. (1998). Отчет № CR72. Усталость водителя: концепции, измерения и меры борьбы с авариями . Канберра, ЦБР: Федеральное управление безопасности дорожного движения Университета Монаша.
Ху, Г., Ру, Ю., и Ли, В. (2014). Проектирование и разработка нового самоиндуцированного магнитореологического демпфера с дифференциалом смещения. J. Intell. Матер. Syst. Struct. 26, doi: 10.1177 / 1045389X14533429
CrossRef Полный текст | Google Scholar
Законодательное собрание Квинсленда: парламентский комитет по безопасности путешествий, (2005). Отчет № 43. Езда на порожнем: усталость от вождения в Квинсленде . Брисбен, BNE: Правительство Квинсленда.
Международная организация по стандартизации, (1997). Механическая вибрация и удары — оценка воздействия на человека вибрации всего тела — Часть 1: общие требования . Женева, Швейцария: международный стандарт ISO.
Ли, В. Х., Ду, Х., Чен, Г., Йео, С. Х. и Го, Н. (2003). Нелинейные вязкоупругие свойства жидкостей MR при колебательном сдвиге большой амплитуды. Rheol. Acta 42, 280–286. doi: 10.1007 / s00397-002-0285-4
CrossRef Полный текст | Google Scholar
Li, W., Yao, G., Chen, G., Yeo, S., and Yap, F.(2000). Испытания и моделирование установившегося режима линейного демпфера MR при синусоидальной нагрузке. Smart Mater. Struct. 9, 95. doi: 10.1088 / 0964-1726 / 9/1/310
CrossRef Полный текст | Google Scholar
Li, Y., Li, J., Li, W., and Du, H. (2014). Современный обзор магнитореологических эластомерных устройств. Smart Mater. Struct., 23, 123001. doi: 10.1088 / 0964-1726 / 23/12/123001
CrossRef Полный текст | Google Scholar
Лю, X., Wang, N., Wang, K., Хуанг, Х., Ли, З., Саркоди-Гян, Т. и др. (2019). Оптимизация характеристик гашения вибрации полуактивной подвески сиденья на основе магнитореологического амортизатора с использованием искусственного интеллекта. Фронт. Матер. 6, 269, doi: 10.3389 / fmats.2019.00269
CrossRef Полный текст | Google Scholar
Maciejewski, I., Krzyzynski, T., and Meyer, H. (2018). Моделирование и контроль вибрации активной горизонтальной подвески сиденья с пневматическими мускулами. J. Vib. Contr. дой: 10.1177/1077546318763435
Google Scholar
Накано, М. (2015). Усиление МР-эффекта бидисперсных МР-жидкостей, содержащих частицы железа микронных и наноразмеров. Бык. Являюсь. Phys. Soc., 60.
Google Scholar
Нгуен, Х. К., Чой, С.-Б., Хип, Л. Д., и Туан, Л. Д. (2019). Характеристика материала жидкости MR при работе тормоза на основе MRF. Фронт. Mater., 6, 125. doi: 10.3389 / fmats.2019.00125
Google Scholar
Ning, D., Ду, Х., Сан, С., Ли, В. и Ли, В. (2018). Энергосберегающая система подвески сиденья с регулируемым демпфированием и возможностью регенерации. IEEE Trans. Ind. Electron. 65, 8080–8091 . doi: 10.1109 / tie.2018.2803756
CrossRef Полный текст | Google Scholar
Ning, D., Sun, S., Zhang, F., Du, H., Li, W., and Zhang, B. (2017). Система наблюдения за нарушениями на основе нечеткого управления Такаги-Сугено для активной подвески сиденья. мех. Syst. Сигнальный процесс. 93, 515–530.doi: 10.1016 / j.ymssp.2017.02.029
CrossRef Полный текст | Google Scholar
Phu, D. X., Quoc Hung, N., and Choi, S.-B. (2018). Новый адаптивный контроллер с обратно пропорционально размытыми значениями, применимый к контролю вибрации магнитореологической системы подвески сиденья. J. Vib. Contr. 24, 5000–5018. DOI: 10.1177 / 1077546317740479
Google Scholar
Sun, S., Ning, D., Yang, J., Du, H., Zhang, S., Li, W., et al. (2017). Разработка подвески сиденья MR с возможностью автономной генерации. Smart Mater. Struct. 26, 085025. doi: 10.1088 / 1361-665x / aa76b6
CrossRef Полный текст | Google Scholar
Sun, S., Tang, X., Yang, J., Ning, D., Du, H., Zhang, S., et al. (2019). Новое поколение магнитореологической подвески автомобиля с регулируемыми характеристиками жесткости и демпфирования. IEEE Trans. Ind. Inf. 15, 4696–4708. doi: 10.1109 / tii.2018.28
CrossRef Полный текст | Google Scholar
Ту, Дж., Ли, З., Чжан, Дж., Гао, К., Ляо, Дж., И Гао, Дж. (2019). Разработка, испытание и механическая модель герметичного магнитореологического демпфера. Фронт. Mater., 6, 118. doi: 10.3389 / fmats.2019.00118
CrossRef Полный текст | Google Scholar
Уэрли, Н. М., Чой, Й.-Т., и Сингх, Х. Дж. (2011). Адаптивные амортизаторы для смягчения ударов при падении. J. Intell. Матер. Syst. Struct. 22, 515–519. doi: 10.1177 / 1045389×10393767
CrossRef Полный текст | Google Scholar
Янг, Б., Chen, S., Sun, S., Deng, L., Li, Z., Li, W., et al. (2020a). Подавление вибрации туннельных бурильных машин нерезонансным методом. мех. Syst. Сигнальный процесс. 145, 106969. doi: 10.1016 / j.ymssp.2020.106969
CrossRef Полный текст | Google Scholar
Янг, Дж., Кристи, М., Сан, С., Нинг, Д., Накано, М., Ли, З. и др. (2020b). Интеграция всенаправленного компонента с автономным питанием в изолятор MRE в интеллектуальную пассивную систему изоляции. мех. Syst.Signal Process., 144, 106853. doi: 10.1016 / j.ymssp.2020.106853
CrossRef Полный текст | Google Scholar
Yang, J., Ning, D., Sun, S., Zheng, J., Lu, H., Nakano, M., et al. (2020c). Полуактивная подвеска с магнитореологическим демпфером с нелинейной составляющей отрицательной жесткости. мех. Syst. Signal Process., 147, 107071. doi: 10.1016 / j.ymssp.2020.107071
Google Scholar
Yu, J., Dong, X., Wang, X., Pan, C., and Zhou, Y. ( 2019). Асимметричная динамическая модель температурно-зависимого магнитореологического демпфера и применение для полуактивной системы. Фронт. Матер. 6, 227. doi: 10.3389 / fmats.2019.00227
CrossRef Полный текст | Google Scholar
Yu, J., Dong, X., Zhang, Z., and Chen, P. (2018). Новая самоподдерживающаяся магнитореологическая подвеска ножничного типа. J. Intell. Матер. Syst. Struct. 30, 1045389X1775425. doi: 10.1177 / 1045389X17754256
CrossRef Полный текст | Google Scholar
Yu, M., Dong, X., Choi, S., and Liao, C. (2009). Смоделированное человеком интеллектуальное управление системой подвески автомобиля с амортизаторами MR. J. Sound Vib. 319, 753–767. doi: 10.1016 / j.jsv.2008.06.047
CrossRef Полный текст | Google Scholar
Yu, M., Yang, P., Fu, J., Liu, S., and Choi, S.-B. (2016). Теоретическая модель полевой проводимости магнитореологических гелей и экспериментальная проверка. Датчик Актуатор Физ. 245, 127–134. doi: 10.1016 / j.sna.2016.05.008
CrossRef Полный текст | Google Scholar
Zhao, L., Yu, Y., Zhou, C., and Yang, F. (2018). Моделирование и проверка подвески сиденья с резиновой пружиной для внедорожников.